

System calibration method based on depth information
A technology of depth information and system calibration, applied in image data processing, instruments, calculations, etc., can solve the problems of low calibration accuracy, affecting measurement accuracy, and correction accuracy, etc. The method is simple and practical, improves calibration accuracy, and ensures accuracy Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] In order to understand the present invention more clearly, describe the present invention in detail in conjunction with accompanying drawing and embodiment:
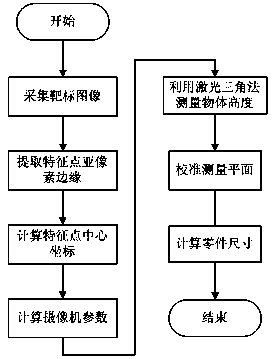
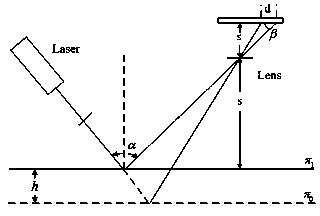
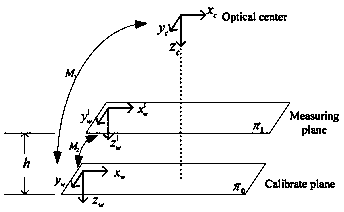
[0023] The flow chart of the present invention is as figure 1 As shown, firstly, the edge detection with adaptive threshold and the polynomial fitting algorithm are used to extract the sub-pixel outline of the feature points, and the center coordinates are obtained by using the ellipse fitting algorithm, and the accurate correspondence with the three-dimensional world coordinates is established, and the camera parameters are obtained by the least square method. Obtain the plane equation of the target. Then the thickness of the part is measured by the point structured light method, and the actual part size is obtained by using the constraints in the depth direction on the basis of the posture obtained by calibration. The specific implementation process of the technical solution of the present invention will be des...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More