

Robot calibrate error compensation method based on fuzzy nerve network
A technology of fuzzy neural network and compensation method, which is applied in the field of mechanical processing and manufacturing, can solve the problems of low robot positioning accuracy, interpolation points that cannot meet robot accuracy, and algorithm convergence cannot be guaranteed, and achieve strong robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0023] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
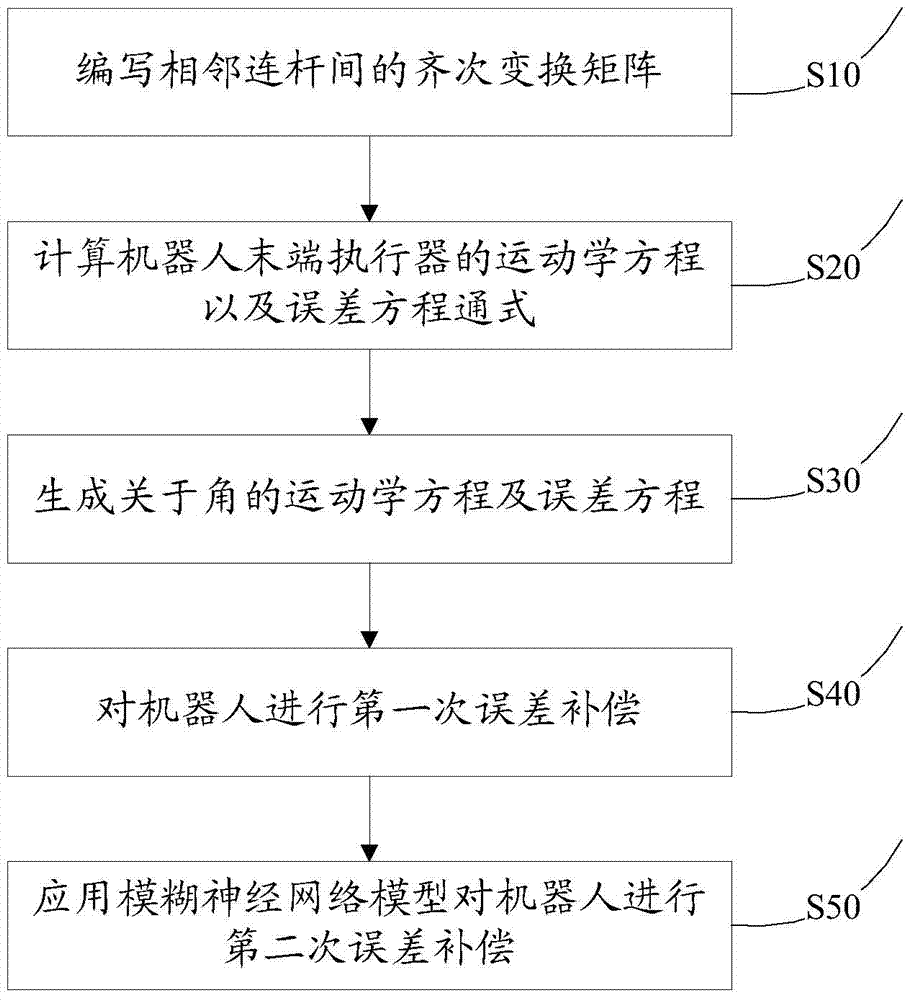
[0024] refer to figure 1 Shown, the present invention discloses a kind of robot calibration error compensation method based on fuzzy neural network, and this method comprises the following steps:
[0025] S10: Write a homogeneous transformation matrix between adjacent connecting rods;
[0026] According to the theory of robot kinematics, the homogeneous transformation matrix between adjacent links is programmed.
[0027] S20: Calculate the kinematic equation of the robot end effector and the general formula of the error equation according to the transformation matrix;
[0028] S30: Generate the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More