

An Optimal Control Method of PID Controller Based on Synthetic Anti-rolling Chaotic System
A chaotic system, optimized control technology, applied to equipment that reduces ship motion, equipment that increases ship stability, and uses hydrofoils to act on the surrounding water surface to reduce ship motion, etc. The actual control effect, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0052] The present invention is described in more detail below in conjunction with accompanying drawing example:
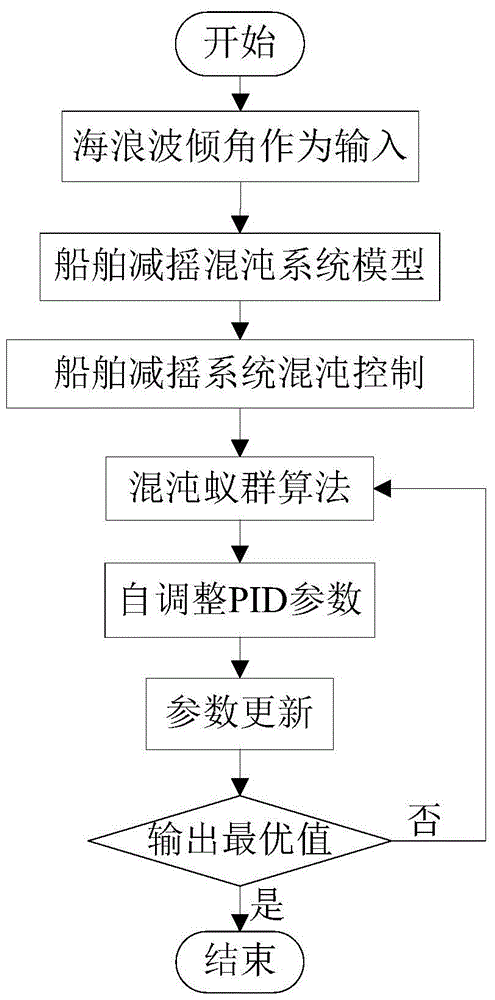
[0053] combine Figure 1-7 , the present invention comprises the following steps:
[0054] (1) Establish a comprehensive anti-rolling system model, and take the wave inclination as the system input.
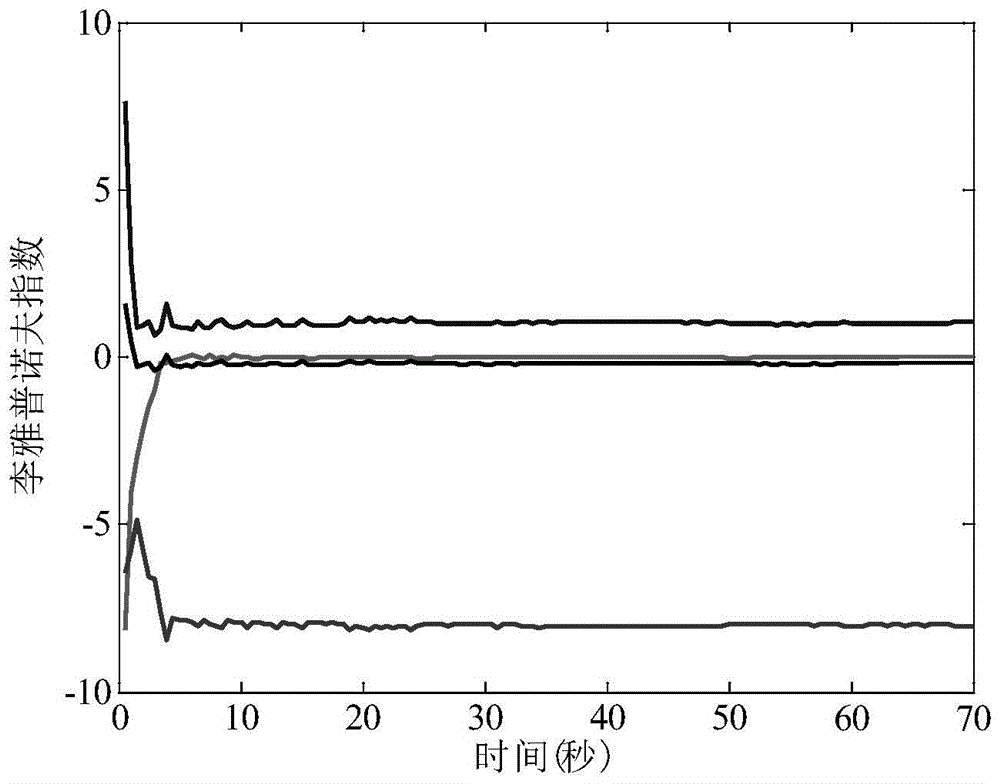
[0055] (2) Transform the integrated anti-rolling system model into an integrated anti-rolling chaotic system model, and verify the chaotic characteristics of the integrated anti-rolling system model by using the phase diagram and Lyapunov exponential spectrum analysis method.
[0056] (3) Using the piecewise quadratic function x|x| as the generator of chaos, select the bifurcation K parameter corresponding to the non-positive Lyapunov exponents of the system as the nonlinear feedback of the ship's comprehensive anti-rolling chaotic system The controller performs chaos control on the integrated anti-rolling chaotic system.
[0057] (4) Using the method of combining...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More