Method for controlling maximum output power of hybrid excitation synchronizing motor
A technology with maximum output power and hybrid excitation synchronization, applied in the field of electrical transmission, it can solve the problems of low efficiency and narrow operating range.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
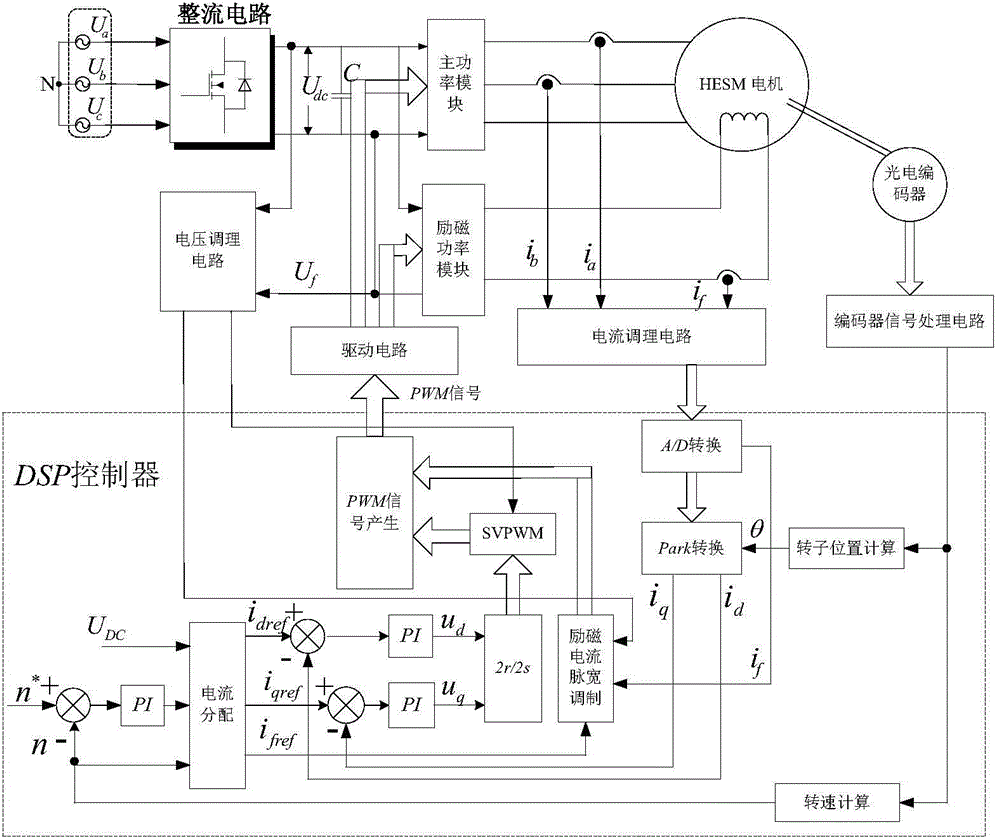
[0032] The present invention will be further described below in conjunction with embodiment and accompanying drawing.
[0033] image 3 In order to realize the system block diagram of the maximum output power control method of the hybrid excitation synchronous motor of the present invention, the control system consists of an AC power supply, a rectifier, a voltage stabilizing capacitor, a DSP controller, a main power converter, an auxiliary power converter, a sensor, and a hybrid excitation synchronous motor , photoelectric encoder and other components.
[0034] The AC power supplies power to the entire system. After being rectified by the rectifier, the voltage is filtered and stabilized, and sent to the main and auxiliary power converters. The Hall voltage sensor collects the bus voltage and sends it to the controller after conditioning. The output terminals of the main and auxiliary power converters are connected to the hybrid excitation synchronous motor. The Hall current...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More