

Large-scale marine pipeline initial point recognition and location method and system based on CCD
A positioning method and starting point technology, applied in auxiliary devices, auxiliary welding equipment, welding/cutting auxiliary equipment, etc., can solve the problems of not suitable for large-scale pipeline welding, rare research and application, and not suitable for precise positioning, etc. Improve the level of automation and welding efficiency, reduce manual positioning errors, and save time and cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] In order to make the purpose, technical solutions and beneficial effects of the present invention clearer, the present invention will be further described in detail below in conjunction with specific embodiments and with reference to the accompanying drawings, but the implementation of the present invention is not limited thereto.
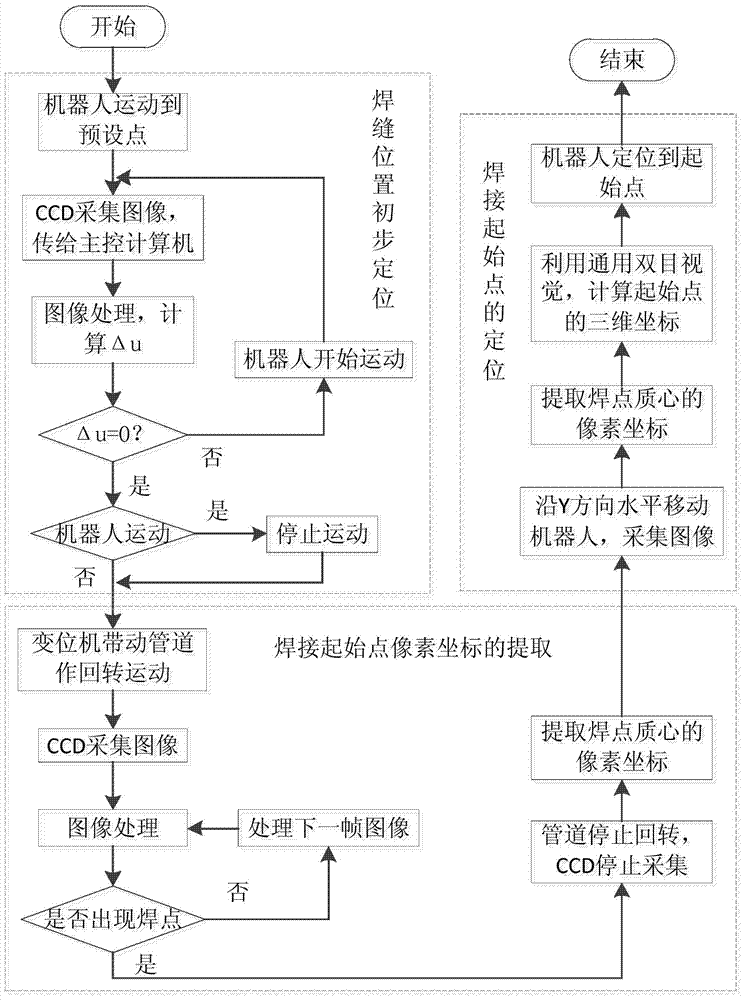
[0032] Please refer to figure 1 As shown, the present invention is based on the CCD large-scale marine pipeline welding starting point identification and positioning method, which includes the following steps:
[0033] Step 1: Preliminary positioning of the weld position
[0034] (a) Keep the pipeline to be welded still, the welding robot moves to the preset position, and the weld seam image of the pipeline to be welded is collected by the CCD industrial digital camera, and the main control computer receives the picture through the USB line and performs image processing. Preliminary Identify the weld, extract the center line of the weld, sc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More