

Spatial manipulator structure capable of stably grabbing
A space manipulator, stable technology, applied in manipulators, motor vehicles, space navigation equipment and other directions, can solve the problem of not having a good structural solution, and achieve the effect of compact structure, reliable function and regular arrangement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The present invention will be described in further detail below in conjunction with the accompanying drawings.
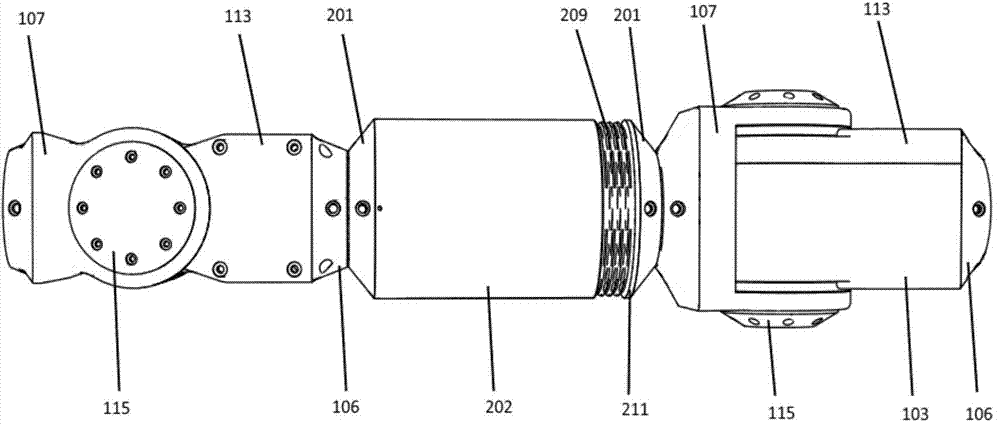
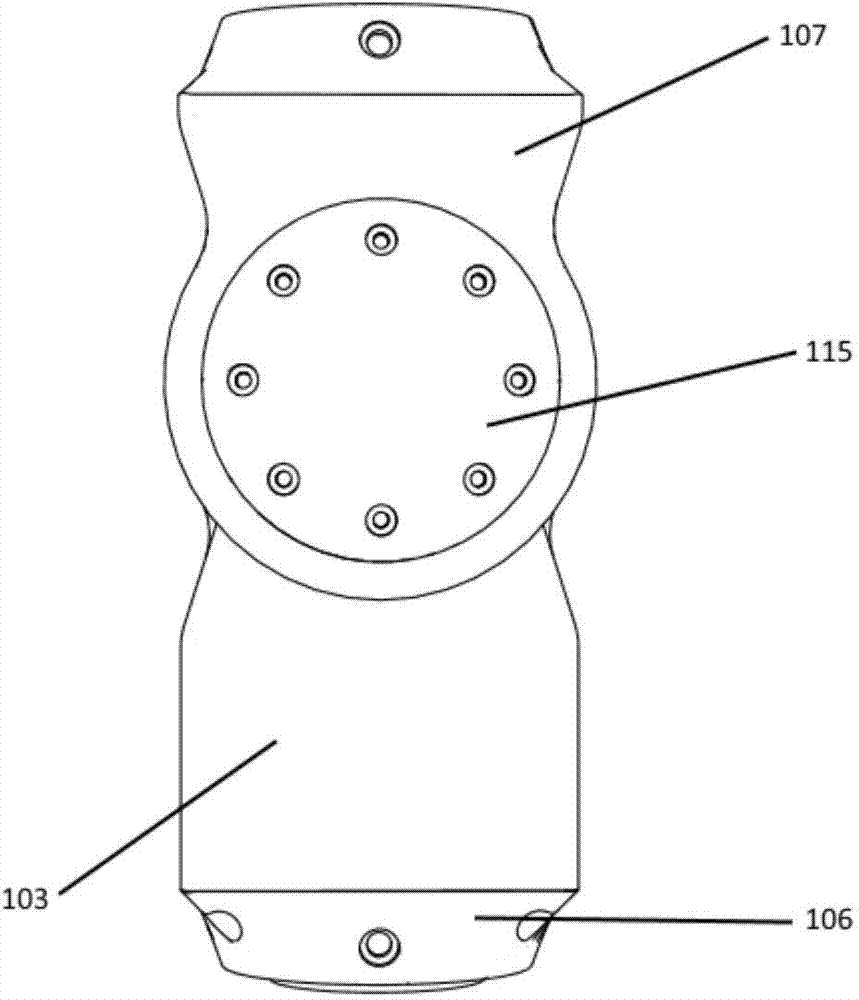
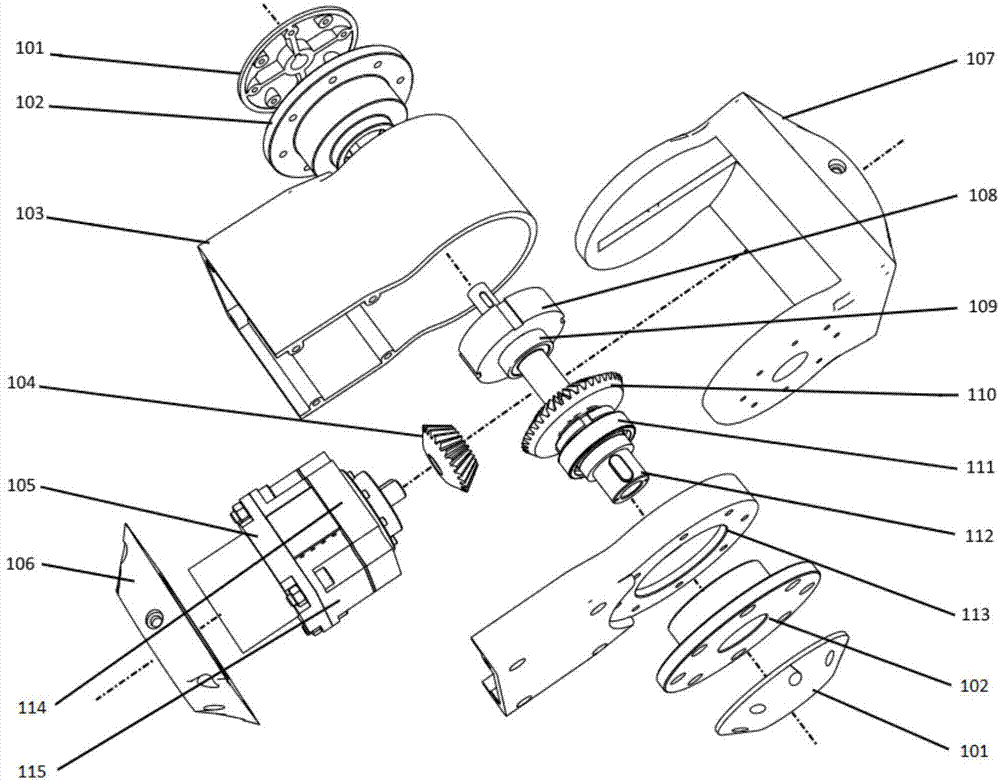
[0019] Such as figure 1 As shown, a space manipulator structure capable of stable capture includes two driving devices with the same structure, which are arranged at the first and last ends of the space manipulator structure, and a passive device; as figure 2 , image 3 As shown, the driving device includes a shaft end cover 101, a bearing end cover 102, a housing A103, a reversing bevel gear A104, a driving motor 105, an end connector 106, a rotary end 107, and a rotary magneto-rheological fluid damper A108, bearing A109, reversing bevel gear B110, bearing B111, transmission shaft 112, housing B113, clutch 114, speed reducer 115; the drive motor 105 is connected with the speed reducer 115 by bolts, and the speed reducer 115 is connected with the speed reducer 115 The clutch 114 is connected through a card slot, the output shaft of the clutch 114 is connec...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More