

System and method for controlling master and slave teleoperation of robot arm force reflecting telepresence
A technology of remote operation control and control system, applied in the direction of manipulators, manufacturing tools, etc., can solve the problem that the position error cannot be eliminated between the master and slave hands, affect the operation performance of the system, and the impact of the master robot, so as to enhance the sense of presence, flexible movement, Ease of handling
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0035] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
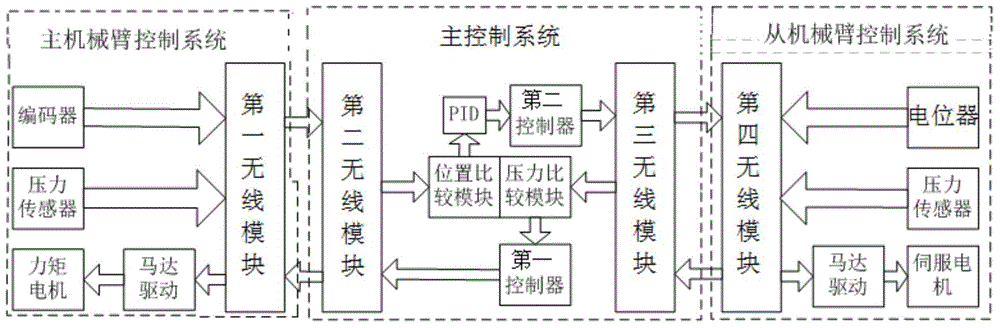
[0036] Such as figure 1 As shown, a master-slave teleoperation control system with telepresence of force sense of a manipulator includes a master manipulator control system, a master control system and a slave manipulator control system, wherein:
[0037] The main mechanical arm control system includes an encoder, a pressure sensor, a torque motor, a motor driver and a first wireless module, the encoder is connected to the first wireless module, the first wireless module is connected to the motor driver, and the motor driver is connected to the installation The torque motors at each joint of the main manipulator are connected with the pressure sensor installed on the main manipulator by the first wireless module;
[0038] The control system of the slave manipulator includes a potentiometer, a pressure sensor, a servo motor, a motor driver and a fourth ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More