

Optimal itineration control method satisfying complex requirement
A technology for optimal itinerary and complex requirements, applied in the fields of mobile robot control, path planning, computer image processing, and communications, and can solve problems such as the inability to meet complex task requirements.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0081] by Figure 5 The switching system is an embodiment, according to the following steps to obtain the optimal path to meet the task requirements, the steps are as follows:
[0082] step 1, Figure 5 The medium switching system contains 5 nodes, the arrows between the nodes represent the conversion relationship, and the values on the connecting lines between the nodes are the weights, where q 0 As the initial node, the weighted switching system T is expressed as follows:
[0083] T = inf 5 inf inf inf inf inf 5 3 inf inf ...
Embodiment 2
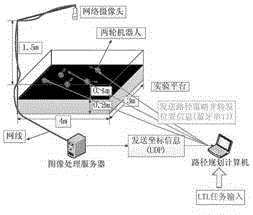
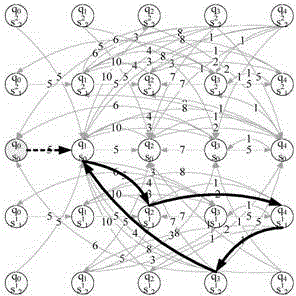
[0091] exist image 3 The control system shown and Figure 12 In the running environment of the robot shown, the task requirement “first reach q 2 and q 6 , and then iterate through q 15 ,q 34 and q 37 "Three nodes" is an embodiment that realizes the mobile robot tour control that meets the task requirements, and the steps are as follows:
[0092] Step 1, obtain the operating environment of the robot through the network camera, and abstract it into a corresponding switching system T 3 Such as Figure 12 shown. switch system T 3 Contains 42 nodes, node q 0 is the starting point of the robot, the connection between nodes represents the conversion relationship in the switching system, and the distance between nodes is the weight, where node q 9 ,q 11 ,q 10 ,q 18 ,q 19 ,q 30 ,q 31 is the obstacle point, node q 2 ,q 6 ,q 15 ,q 34 ,q 37 It is the node that may need to tour in the robot task;
[0093] Step 2, based on the task requirement "reach q first 2 and q...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More