

Pilotless automobile combination navigation method based on vision screening
An unmanned vehicle and integrated navigation technology, applied in the field of integrated navigation and unmanned vehicle integrated navigation, can solve the problems of inaccurate positioning and pseudo-range estimation deviation, so as to improve reliability, novel methods, and avoid dimensional disasters. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The present invention will be further described below in conjunction with the drawings and embodiments.
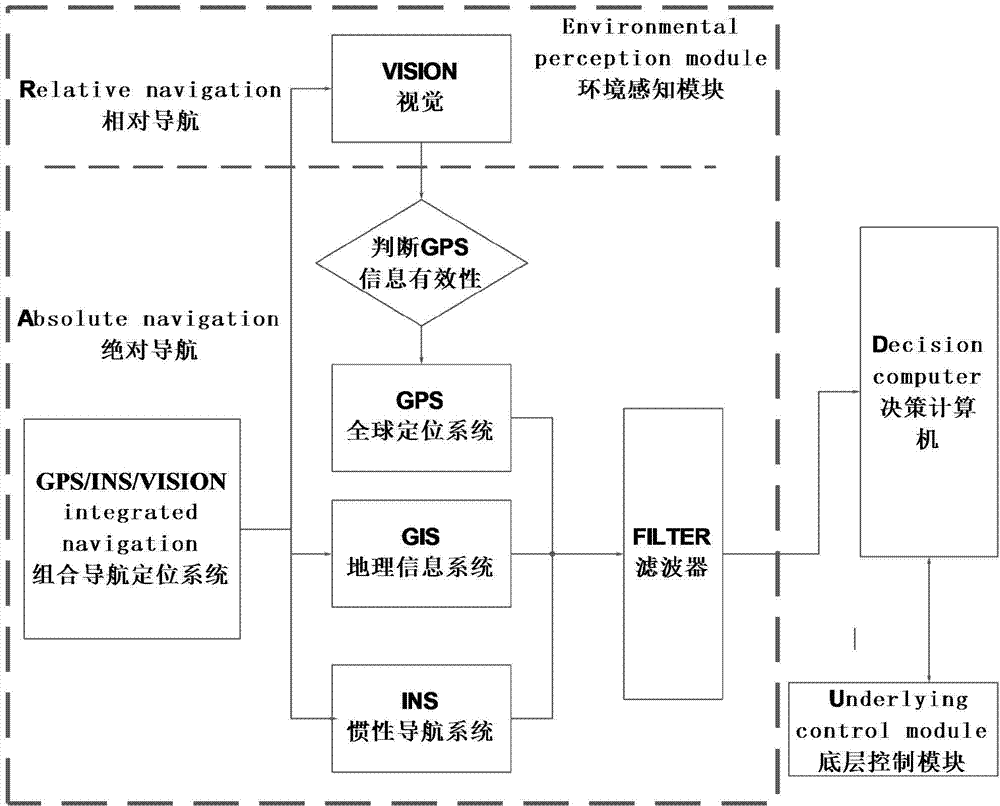
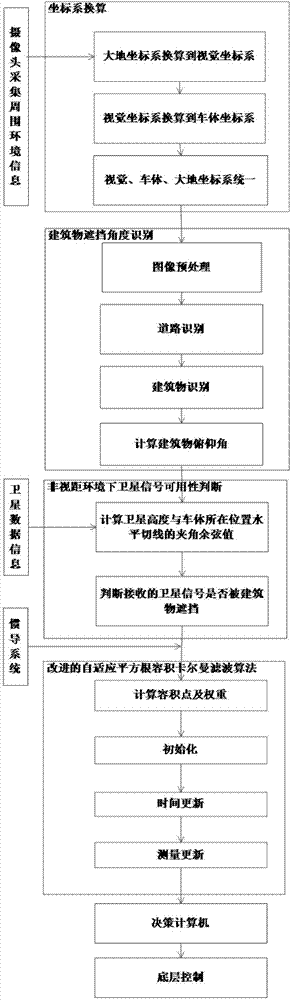
[0041] Schematic diagram of the integrated navigation system for driverless cars based on visual screening figure 1 Shown. The flow chart of the method of the present invention is as follows figure 2 As shown, including the following steps:
[0042] Step 1. Coordinate system conversion.
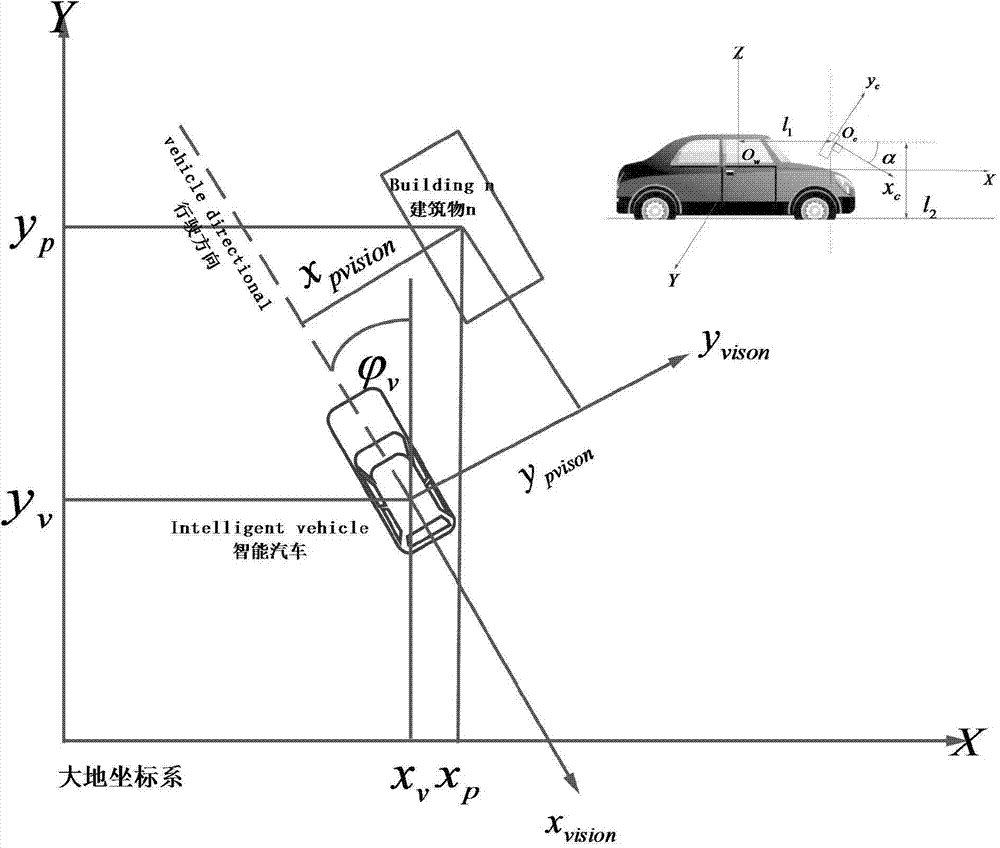
[0043] Step 1.1: Convert the geodetic coordinate system to the visual coordinate system.
[0044] The camera imaging transformation involves the conversion between different coordinate systems, including the geodetic coordinate system, the camera coordinate system, the imaging plane coordinate system and the image plane coordinate system.
[0045] In the smart car vision system, the geodetic coordinate system needs to be converted into the camera coordinate system. w On the ground directly below the center of gravity of the car, z v Axis vertically upwards, x v The axis is parallel to the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More