

High-precision autonomous obstacle-avoiding flying method for unmanned plane
A UAV, high-precision technology, applied in the field of UAV navigation, can solve problems such as low operation efficiency, high labor cost, and inability to use fully autonomous flight methods.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The present invention will be further described below in conjunction with the embodiments and with reference to the accompanying drawings.
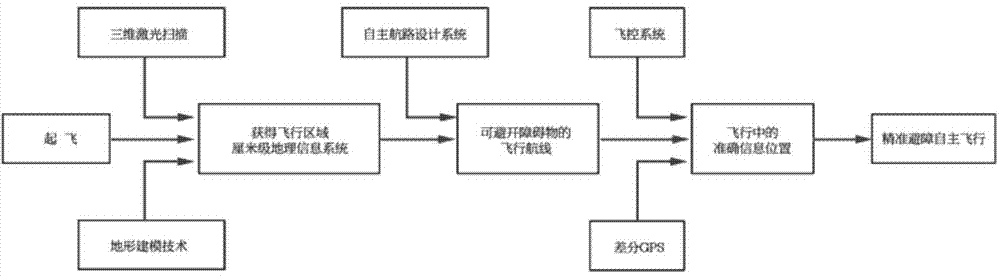
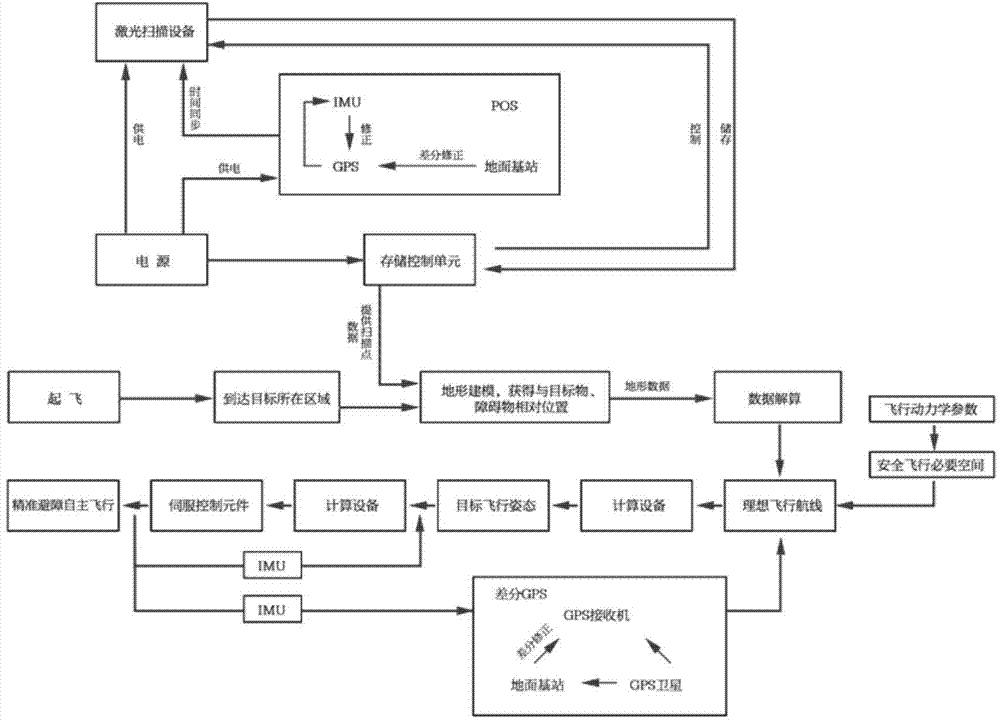
[0037] A high-precision aided obstacle-avoiding flying method for an unmanned aerial vehicle, comprising the following steps:
[0038] (1) Establish a high-precision map model:
[0039] 1.1) When the UAV-loaded operation equipment arrives at the designated operation area, the precise spatial position of the UAV is obtained through the differential GPS system, and the precise spatial coordinates of the laser scanning system are obtained based on the relative position between the known laser scanning system and the UAV , wherein the differential GPS system is implemented by a micro differential GPS module;
[0040] 1.2) The inertial navigation device is used as the reference center of the entire lidar system to obtain the attitude and coordinate position of the UAV in real time that meet the accuracy requirements;
[0041] 1.3) Gat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More