

Depth map based hand feature point detection method
A feature point detection, depth map technology, applied in image enhancement, image analysis, image data processing and other directions, can solve problems such as connection, application range limitations, etc., to overcome the limitations.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
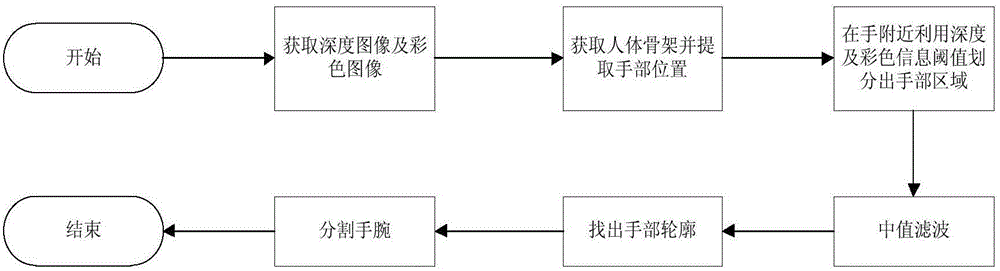
[0017] This depth map-based hand feature point detection method includes the following steps:
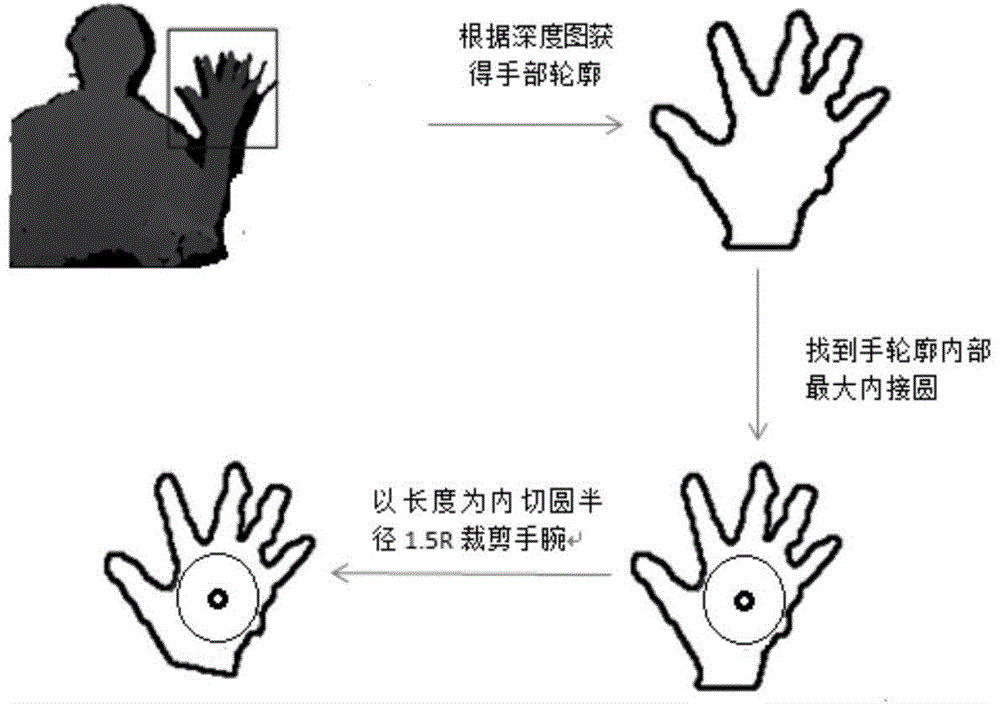
[0018] (1) Hand segmentation: Use Kinect to collect human motion video sequences to extract hands, use OPENNI to obtain human hand position information through depth maps, and obtain palm points initially by setting search areas and depth threshold methods; use OPENCV The find_contours function obtains the contour of the hand; by finding the center of the largest inscribed circle in the contour of the hand, the palm point of the hand is accurately determined, and by calculating the shortest distance m between all internal points of the hand and the contour point, the maximum value M is found in the shortest distance , the inner point of the hand represented by M is the palm point, and the inscribed circle radius R=M;
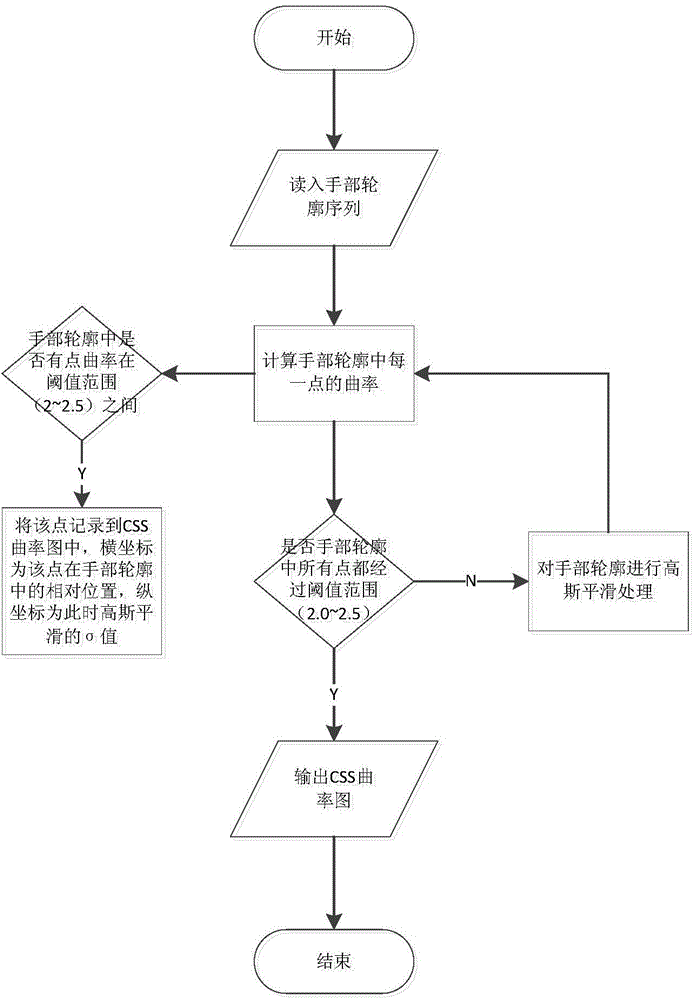
[0019] (2) Feature point extraction: Design and implement an improved hand feature point (fingertip point and finger valley point) detection method based on CSS curva...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More