

Camera and robot relative pose calibration method based on pixel space optimization
A technology of relative pose and calibration method, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of low accuracy, error, noise sensitivity, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
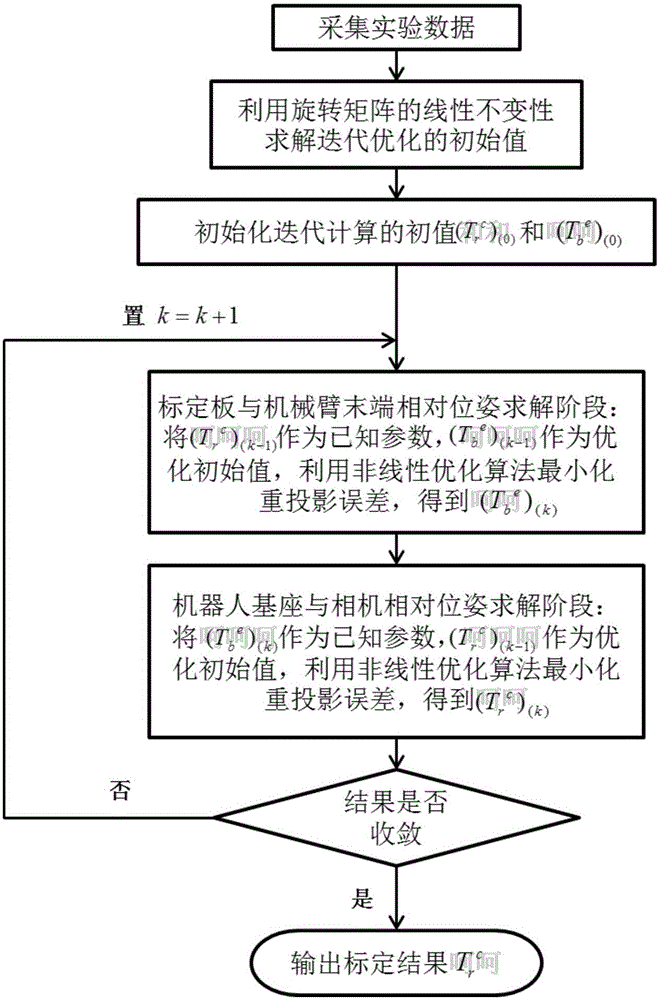
[0015] The invention discloses a method for calibrating the relative pose of a camera and a robot based on pixel space optimization. figure 1 Schematic diagram of the calibration method for the relative pose of the camera and the robot based on pixel space optimization. The specific steps are as follows:
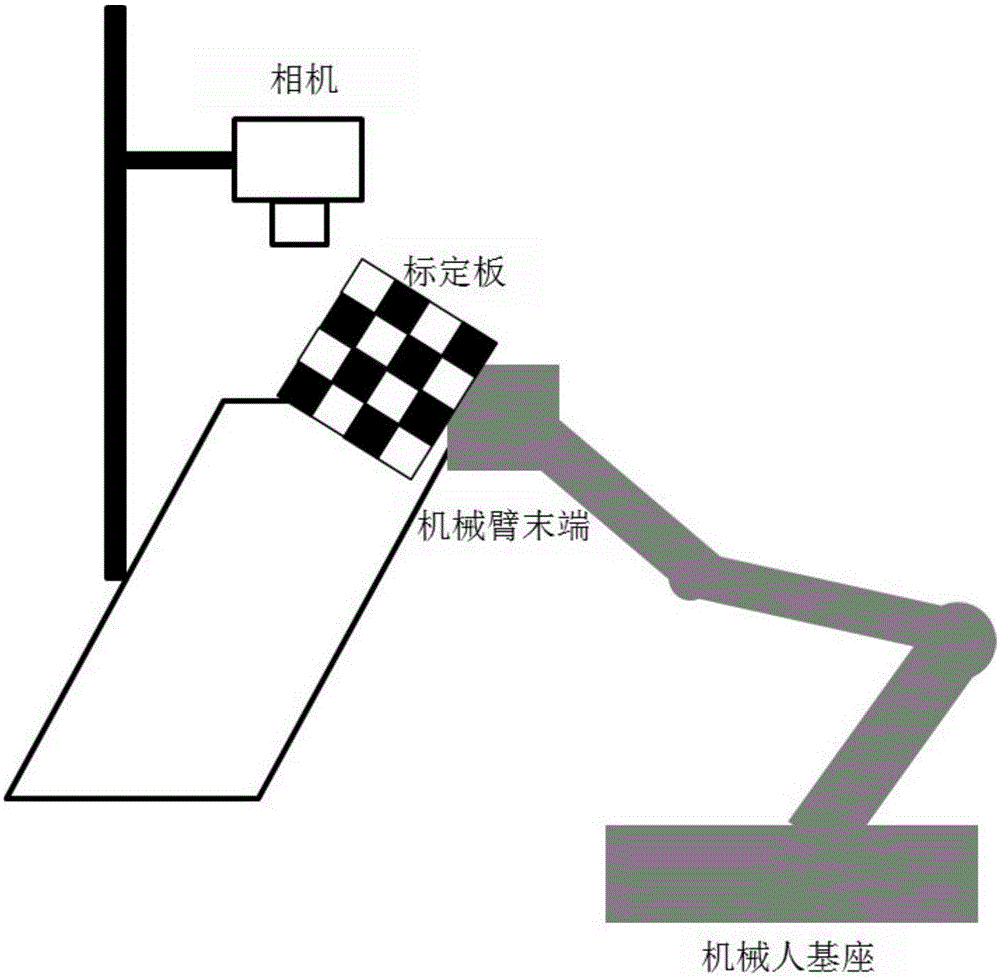
[0016] (1) Fix the calibration board at the end of the robot to control the movement of the robot so that when the movement stops, the calibration board is in the camera's field of view;
[0017] (2) When the movement stops, record the conversion relationship T from the robot end coordinate system to the base coordinate system e r , The image is collected to obtain the coordinates of the checkerboard corner points on the calibration board {(u 1 ,v 1 ),(u 2 ,v 2 ),...,(u m ,v m )}, calculate the conversion relationship T from the calibration board coordinate system to the camera coordinate system b c ;
[0018] (3) Control the robot to move n times to obtain the state data when n+1 m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More