Position estimation method based on integrated navigation of multiple sensors
A comprehensive navigation, multi-sensor technology, applied in position estimation based on DR/GPS/DME/VOR integrated navigation, high-precision, high-reliability positioning requirements of civil aircraft, can solve expensive inertial navigation systems, complex positioning methods, real-time Sexual issues, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
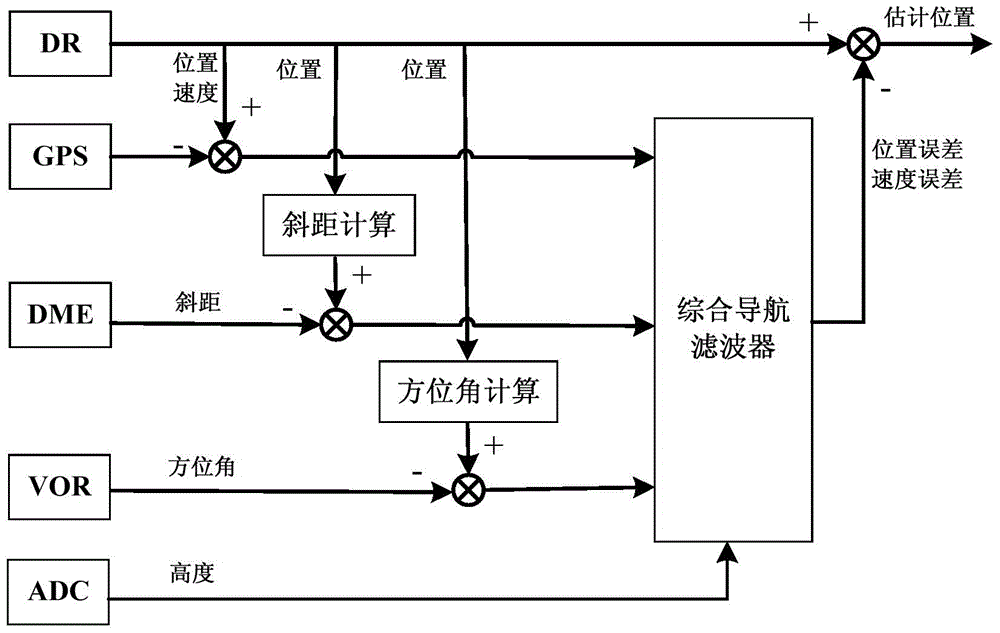
[0097] see figure 1 , the present invention fully utilizes the output parameter of existing DR, GPS, DME, VOR and ADC system under the premise of not using inertial navigation system, realizes the estimation of position information, comprises the following steps:
[0098] Step 1, collect the parameter that each navigation equipment output of airborne, described parameter comprises: (1) DR system output position, velocity information; (2) the position of GPS system output, velocity information; (3) the slant distance of DME system output Information; (4) Azimuth information output by the VOR system; (5) Altitude information output by the ADC system;
[0099] Step 2, establish the state equation of the integrated navigation system according to the height information output by the DR system error model and the ADC system;
[0100] X · ( t ) = F ( ...
Embodiment 2
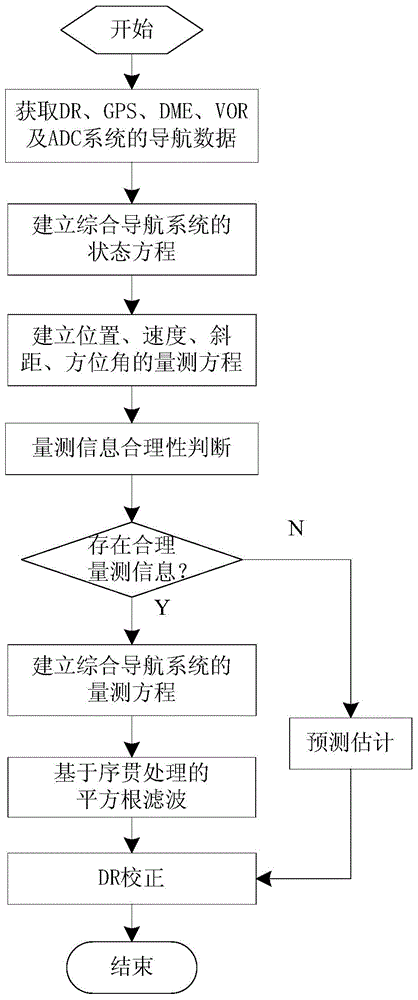
[0163] Such as figure 2 As shown, the present invention also proposes a solution for improving the first embodiment. In the second embodiment, the rationality of the measurement information is checked to realize the inspection and isolation of unreasonable information and avoid the introduction of unreasonable measurement information. In the filtering system, the stability and reliability of the system are improved; and different filtering methods are used for the two cases of reasonable and unreasonable measurement information, which effectively solves the problem of solving the problem of unreasonable measurement information. , to ensure the continuity of the position estimation data, the implementation steps of the second embodiment are as follows:
[0164] Steps 1-3 are the same as in Embodiment 1.
[0165] Step 4, using the measurement information rationality check method to sequentially perform position, speed measurement information (abbreviation: GPS measurement info...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More