

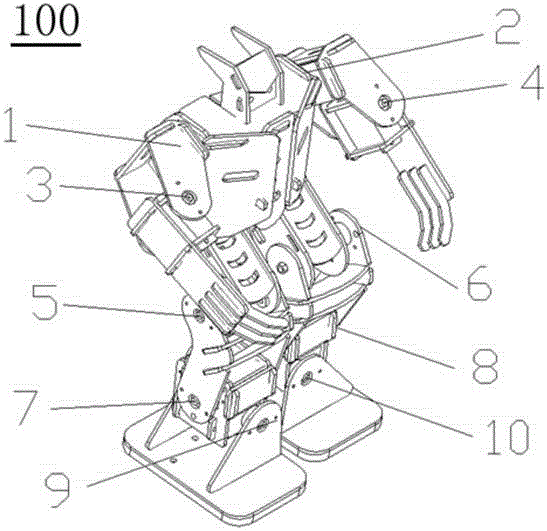
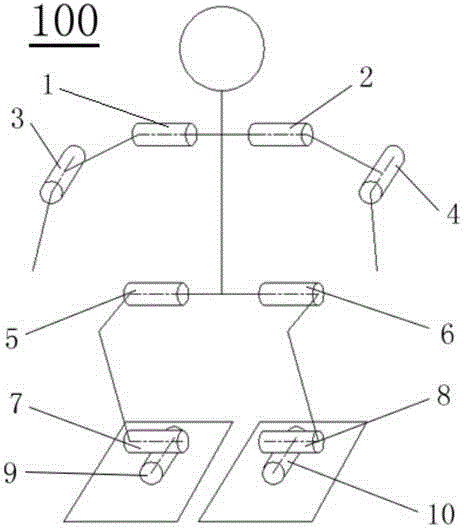
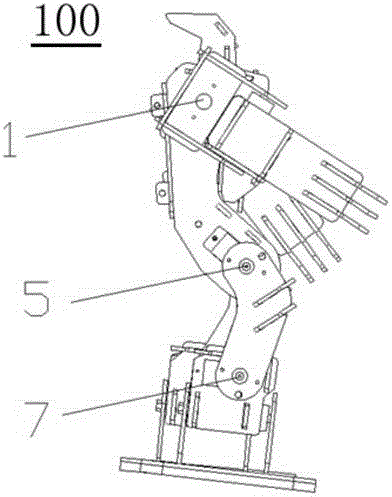
Ten degrees of freedom robot
A robot and degree of freedom technology, applied in the direction of manipulators, manufacturing tools, etc., can solve the problems of unsuitable teaching application fields, lack of stability, poor flexibility, etc., and achieve the effect of reducing programming difficulty, improving stability, and good center of gravity distribution
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0060] Exemplary embodiments of the present invention will be described in detail below with reference to the accompanying drawings, wherein the same or similar reference numerals represent the same or similar elements. In addition, in the following detailed description, for purposes of explanation, numerous specific details are set forth in order to provide a comprehensive understanding of the embodiments of the present disclosure. It may be evident, however, that one or more embodiments may be practiced without these specific details. In other instances, well-known structures and devices are shown in diagrammatic form to simplify the drawings.
[0061] In this paper, the degree of freedom is an existing term for a mechanical system, which means: according to the mechanical principle, the mechanism has the number of independent motion parameters that must be given when determining the motion (that is, in order for the position of the mechanism to be determined, the number of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More