

A precision approach course indicator calibration system and calibration method for a rotor unmanned aerial vehicle
A technology of unmanned rotor and indicator, applied in the direction of instruments, measuring devices, etc., can solve the problems of complex test methods, the impact of increasing test accuracy, inconvenient equipment layout and adjustment, etc., to save expenses and personnel consumption, and reduce flight safety Hidden dangers, convenient and fast test results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The precision approach course indicator verification system and verification method of the rotor UAV provided by the present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
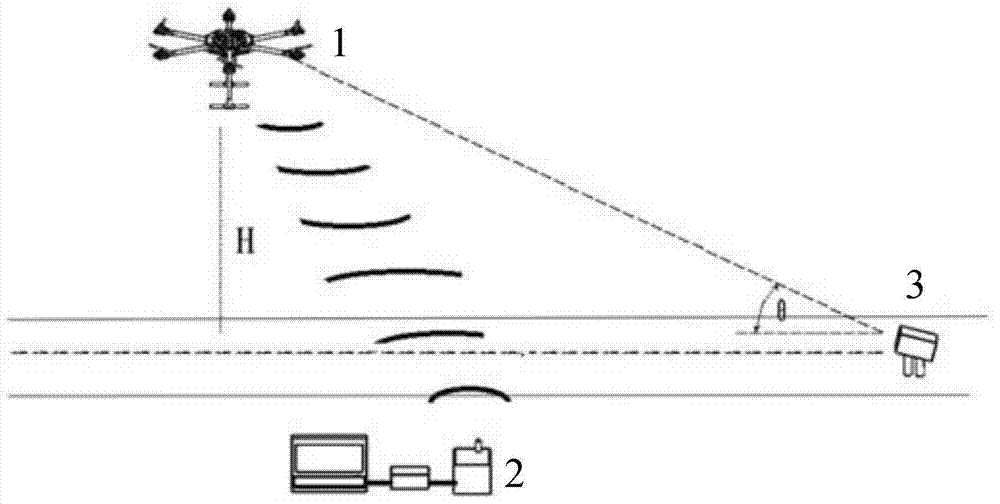
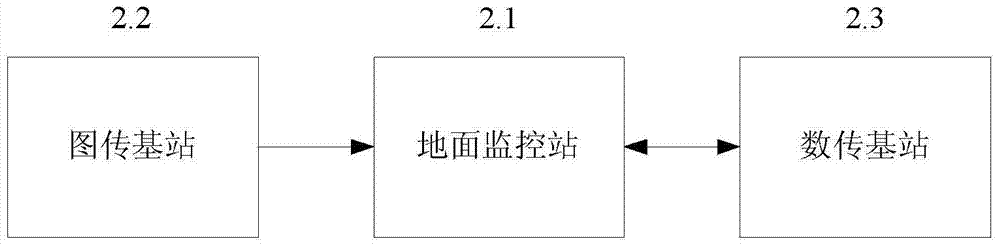
[0028] Such as figure 1 As shown, the rotor UAV precision approach course indicator verification system provided by the present invention includes: rotor UAV carrier 1 and ground station 2;
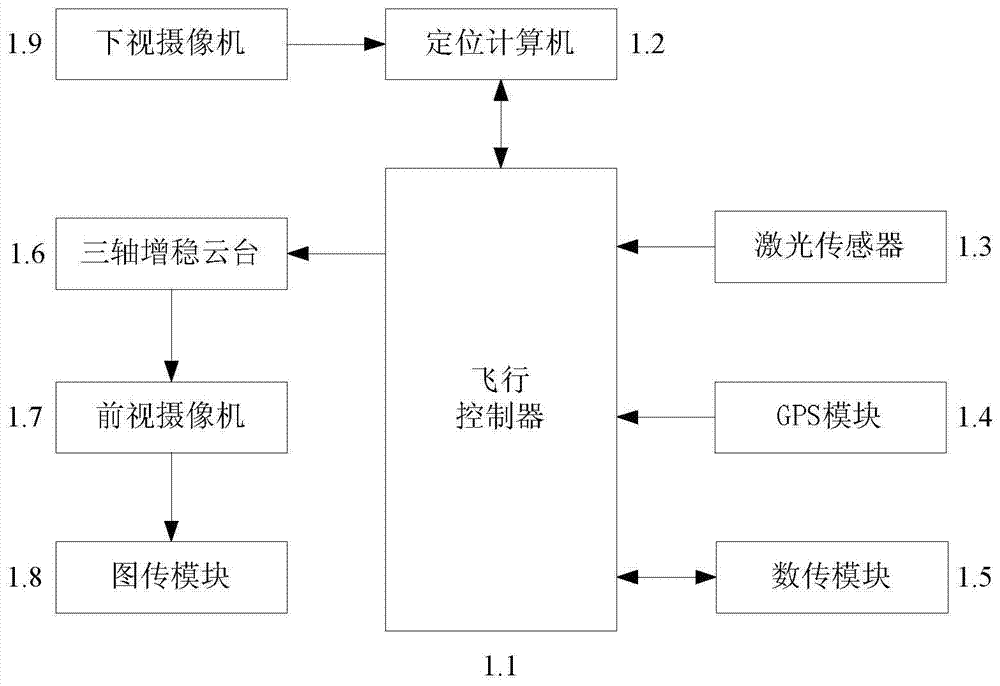
[0029] Such as figure 2 As shown, the rotor drone carrier 1 includes: the drone body and a flight controller 1.1 installed on the fuselage, a positioning computer 1.2, a laser sensor 1.3, a GPS module 1.4, a data transmission module 1.5, a three-axis Stabilized cloud platform 1.6, front-view camera 1.7, image transmission module 1.8 and down-view camera 1.9; of which: flight controller 1.1 is connected with positioning computer 1.2, laser sensor 1.3, GPS module 1.4, data transmission module 1.5 and three-axis stabilization cloud The platfor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More