

Switching control system and method for gaits of humanoid biped robot
A biped robot and control system technology, applied in the field of robotics, can solve problems such as complex structure and limited application range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] In order to further understand the present invention, the preferred embodiments of the present invention are described below in conjunction with examples, but it should be understood that these descriptions are only to further illustrate the features and advantages of the present invention, rather than limiting the claims of the present invention.
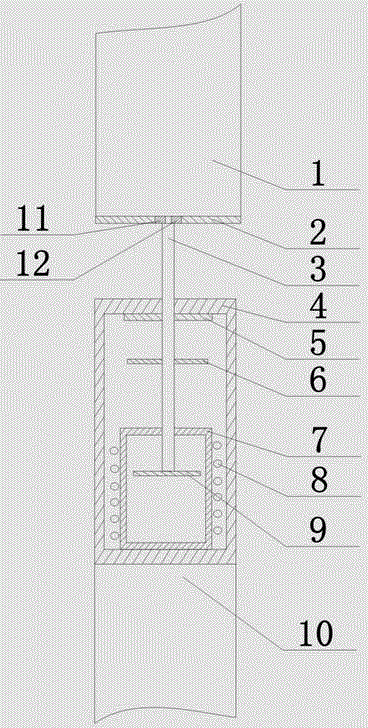
[0041] The invention provides a gait switching control system for a humanoid biped robot, which includes at least one compliant controller, and the compliant controller connects the upper and lower parts of the robot's thigh, lower leg, torso or other joint rods. Among them, the compliance controller includes a length adjustment unit and a feedback loop.
[0042] as attached figure 1 As shown, the compliance controller adjusts the position S of the barycenter of each joint rod of the robot through the reciprocating motion of the piston rod 3 i , speed V i and acceleration a i , the main components of which are the magneto...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More