

Piezoelectric-type flexible three-dimensional tactile sensing array and preparation method of same
A tactile sensing and piezoelectric technology, which is applied in the field of flexible three-dimensional tactile sensing arrays, can solve the problems of inability to contact and quickly respond to slip signals, inability to arrange fingers in a curved surface array, and inability to bend at will. Easy to operate and easy to load on curved surfaces
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention will be further described below in conjunction with drawings and embodiments.
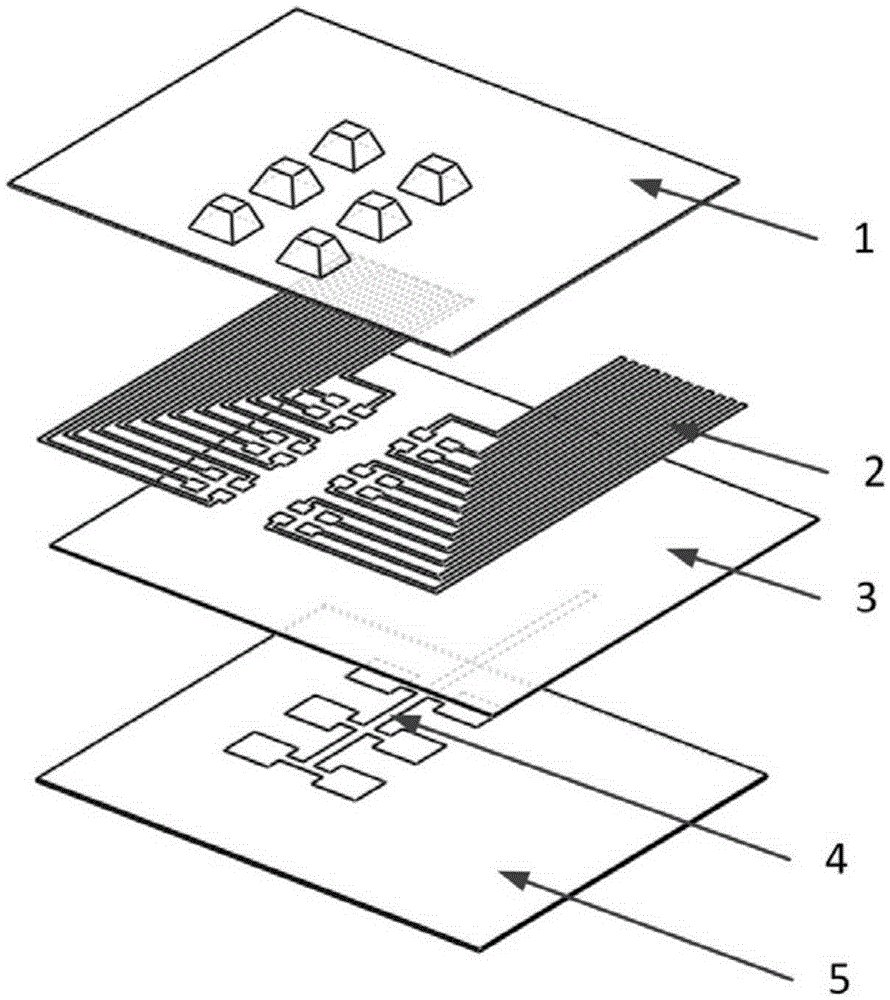
[0030] Such as figure 1 As shown, the flexible three-dimensional tactile sensing array of the present invention consists of a PDMS surface convex layer 1, an upper electrode layer 2, a PVDF piezoelectric film layer 3, a lower electrode layer 4, and a PDMS flexible substrate layer 5 from top to bottom. composed together. Among them, the convex layer 1 on the PDMS surface plays the role of transmitting the contact force, and at the same time isolates the upper electrode layer 2 from the outside world to reduce interference; the PVDF piezoelectric film layer 3 forms a piezoelectric Capacitance converts the force signal into a charge signal; the PDMS flexible base layer 5 isolates the lower electrode layer 4 from the outside, protects the lower electrode layer and isolates external interference.
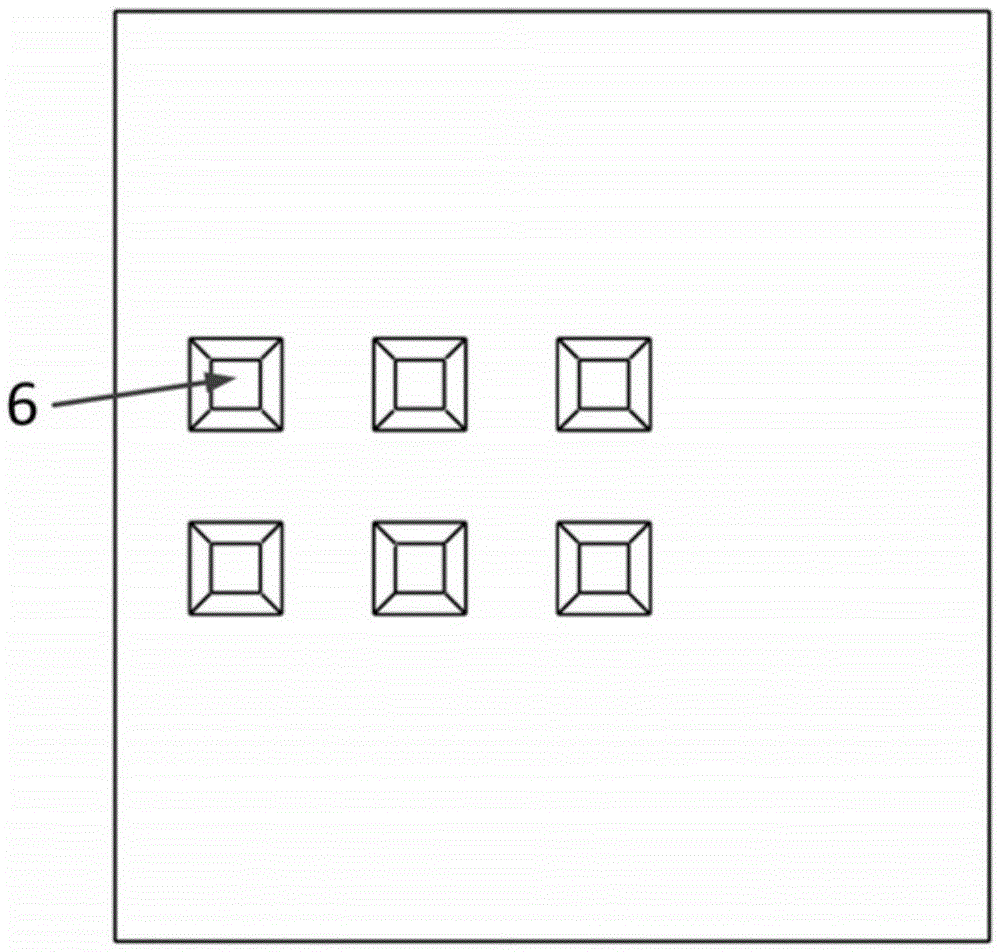
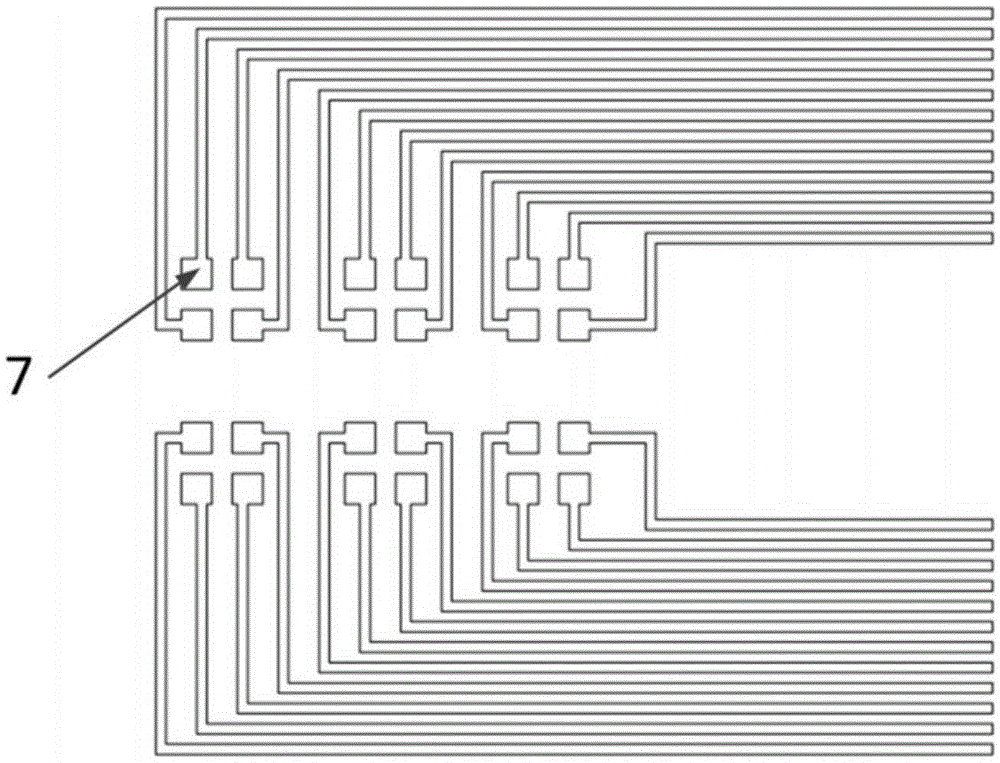
[0031] Such as figure 2 , image 3 , Figure 4 As shown, the PDMS surfa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More