

Non-intermittent automatic operation type minimally invasive spinal robot arm based on lateral wing guidance
An automatic operation, non-intermittent technology, used in surgery, medical science, diagnosis and other directions, can solve problems such as instability, heat generation, missed hands, etc., to achieve the effect of easy operation and wide application range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
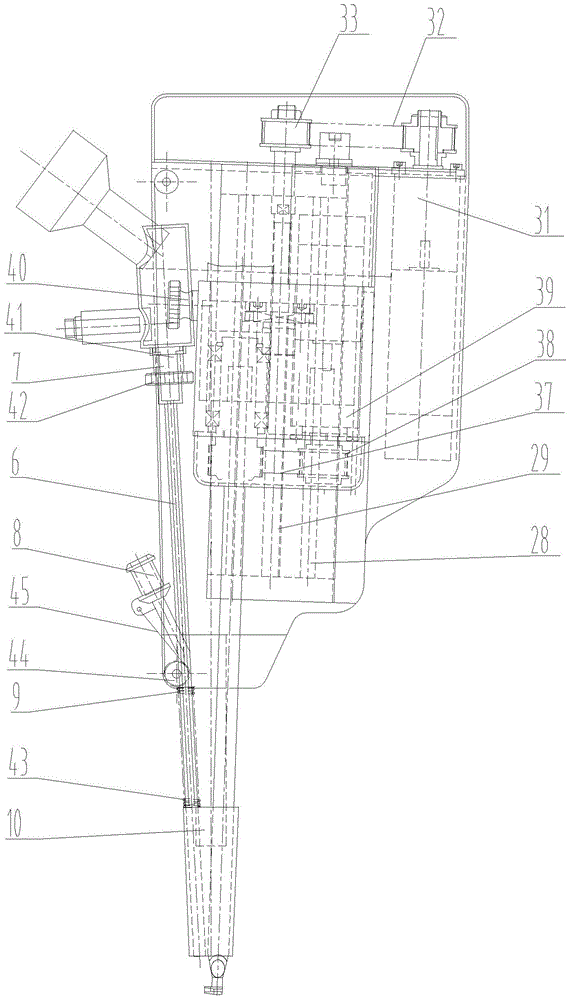
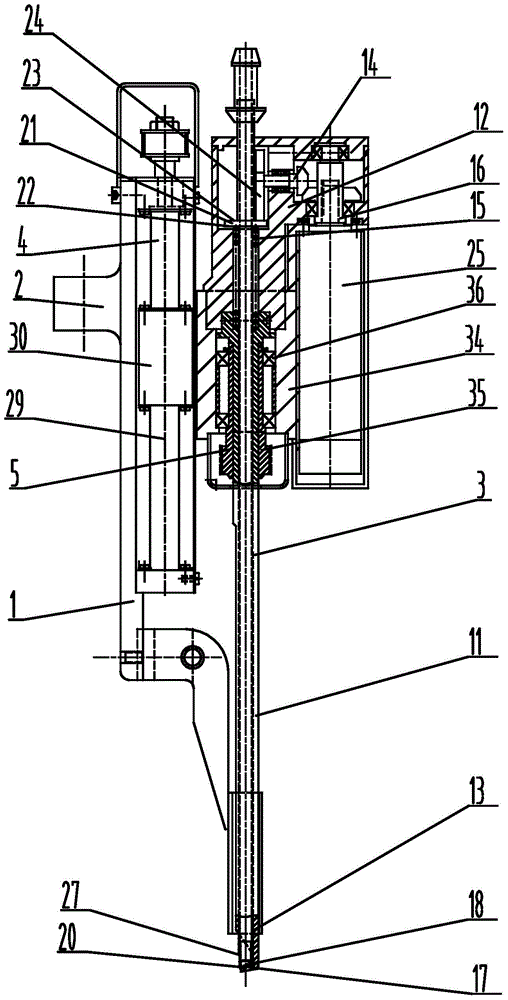
[0022] Such as Figure 1~4 The shown non-intermittent automatic operation spinal minimally invasive robotic hand guided by side wings 19 includes a base plate 1, which is provided with an interface 2, which can be connected to the robot body. It is: in order to effectively observe the implementation site and at the same time correctly suck the pathological tissue 26, the endoscopic lens 6, the suction device 8 and the main lifting mechanism 4 are arranged on the substrate. Specifically, the adopted main lifting mechanism 4 is connected with a biting device through a steering mechanism 5 , and the biting device is connected with the connecting seat 12 . Moreover, the biting device includes a biting pliers 3 , and a guide tube 11 is arranged inside the biting pliers 3 . Considering the normal operation of the biting pliers 3 , a cam mechanism 14 is connected to the biting pliers 3 , and the cam mechanism 14 is connected with a biting motor 25 through a connecting shaft 16 . Co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More