

CAN bus-based distributed cleaning robot control system and control method
A CAN bus and cleaning robot technology, applied in the field of control systems for distributed cleaning robots, can solve the problems of difficult maintenance of control boards, consume manpower and material resources, and poor scalability, so as to achieve good scalability, improve operating efficiency, and reduce dependent effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0074] In order to more clearly illustrate the embodiments of the present invention or the technical solutions in the prior art, the specific implementation manners of the present invention will be described below with reference to the accompanying drawings. Obviously, the accompanying drawings in the following description are only some embodiments of the present invention, and those skilled in the art can obtain other accompanying drawings based on these drawings and obtain other implementations.
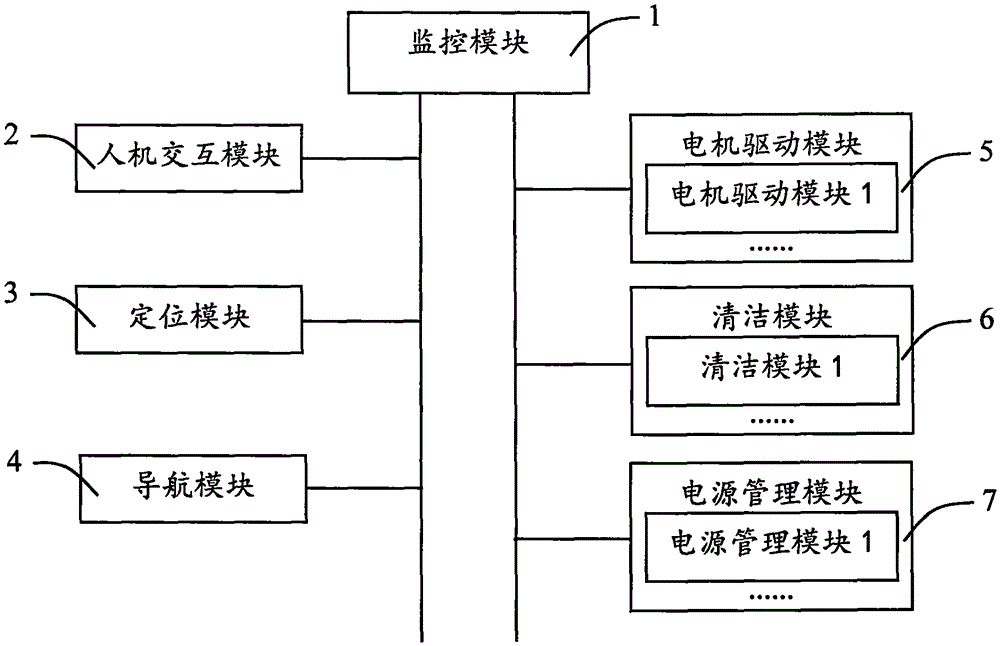
[0075] Such as figure 1 Shown is a schematic structural diagram of the first embodiment of the CAN bus-based distributed cleaning robot control system provided by the present invention. It can be seen from the figure that the distributed cleaning robot control system includes: a monitoring module 1, a human-computer interaction module 2. Positioning module 3, navigation module 4, at least one motor drive module 5, at least one cleaning module 6 and power management module 7, and e...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More