

An AGV navigation control method based on two-dimension code image tags
A two-dimensional code label and image label technology, which is applied in the field of AGV navigation control based on two-dimensional code image labels, can solve the problems of changing paths, inconvenience, and complex on-site construction.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
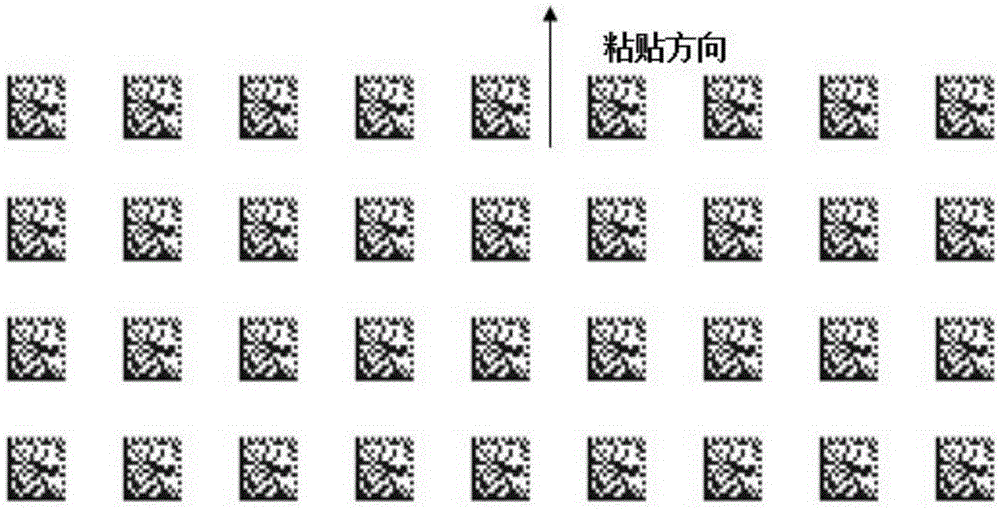
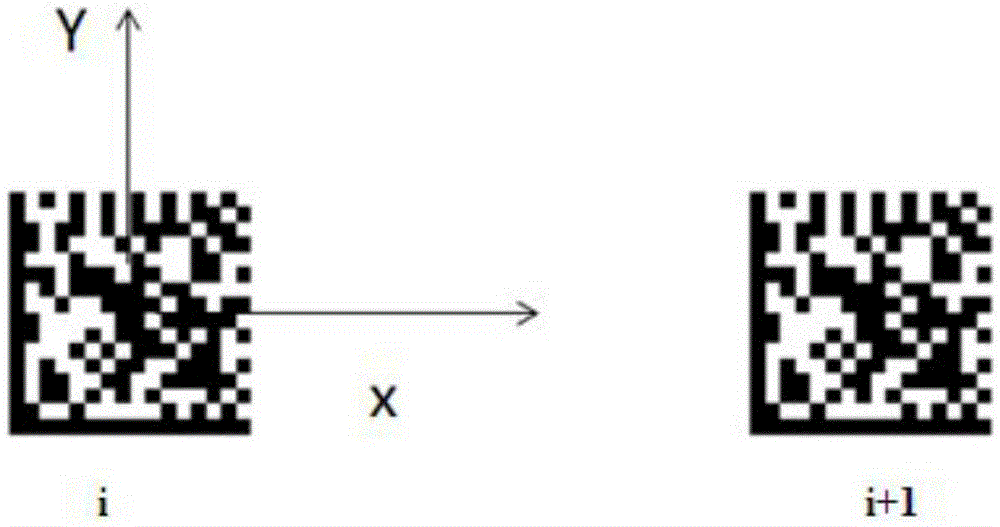
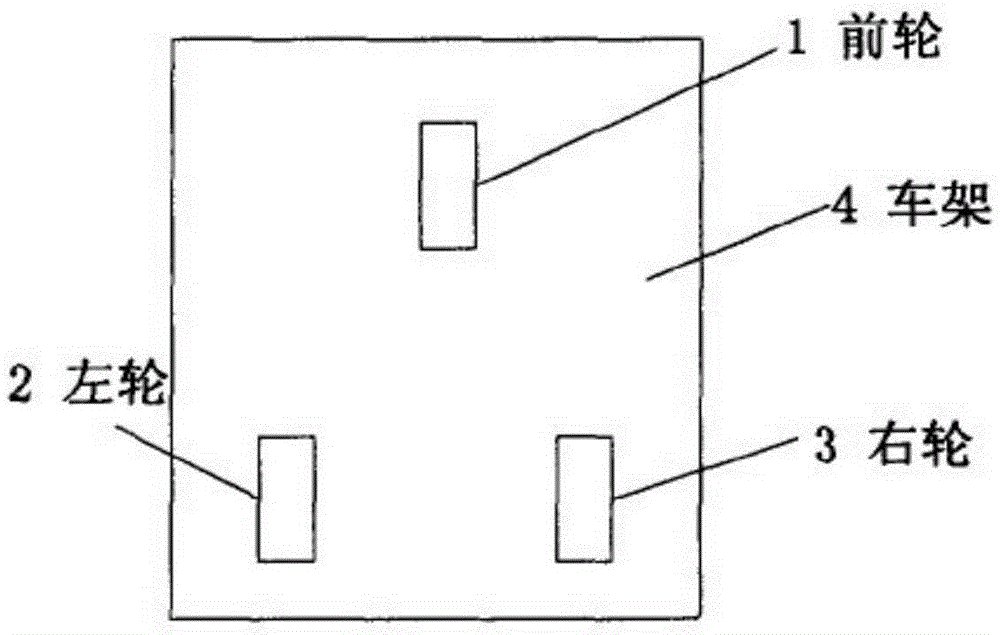
[0041] In this embodiment, taking the single steering wheel AGV as an example, the AGV navigation control based on the two-dimensional code image label is realized according to the following process: 1. Obtain the range size of each pixel in the scanned image of the two-dimensional code label scanner; 2. 1. Obtain the corresponding ID number and the pose of the two-dimensional code image label in the image's own coordinate system according to the scanned image of the two-dimensional code label scanner; 3. The AGV car receives the navigation path instruction sent by the dispatching center; The navigation path command establishes the local navigation coordinate system in turn, and calculates the initial pose of the AGV car in the local navigation coordinate system; 5. Plan the arc trajectory of the AGV car between the two two-dimensional code image tags in turn; 6. According to the planned The arc radius calculates the control amount of the AGV car, so that the AGV car sequential...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More