

A semi-flexible robot based on liquid metal
A liquid metal and robotic technology, applied in the field of robotics, can solve the problems of limited degrees of freedom of robots, rigid robots are not as flexible as living organisms, and restrictions, and achieve good electrical and thermal conductivity, convenient shape, and various structures.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
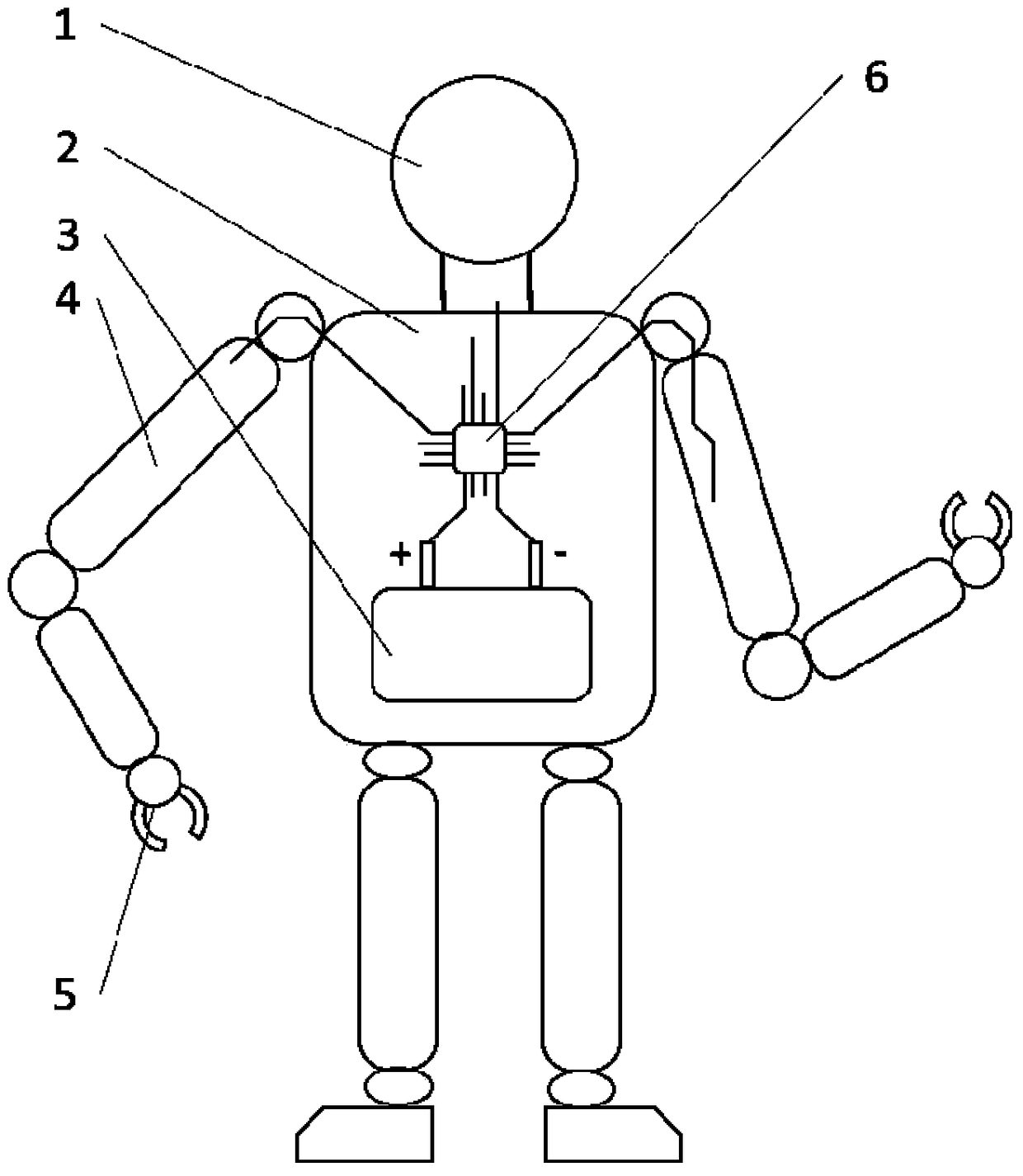
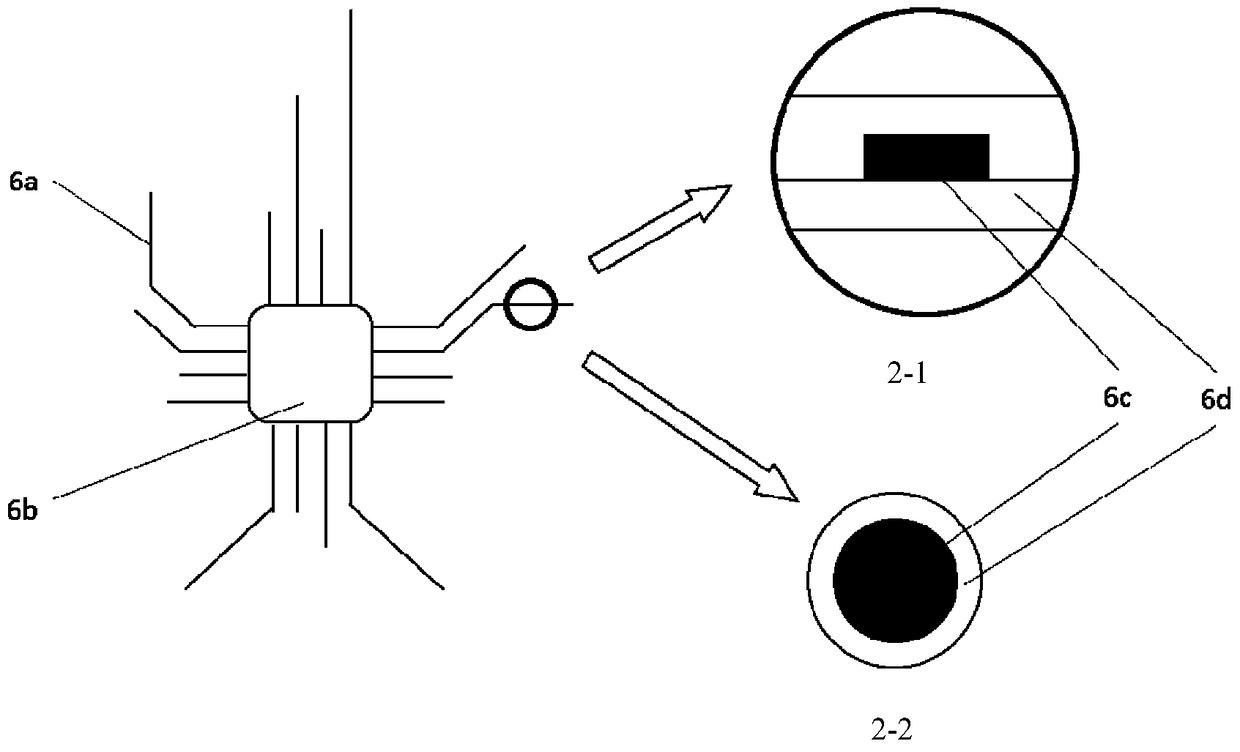
[0083] see figure 1 , the robot 1 includes a torso 2, an arm actuator 4 connected to the torso 2, a hand actuator 5 connected to the end of the arm actuator 4, an energy storage device 3 built in the torso 2, and distributed in the torso 2, The flexible circuit 6 based on liquid metal inside the arm actuator 4 and the hand actuator 5 consists of several parts.
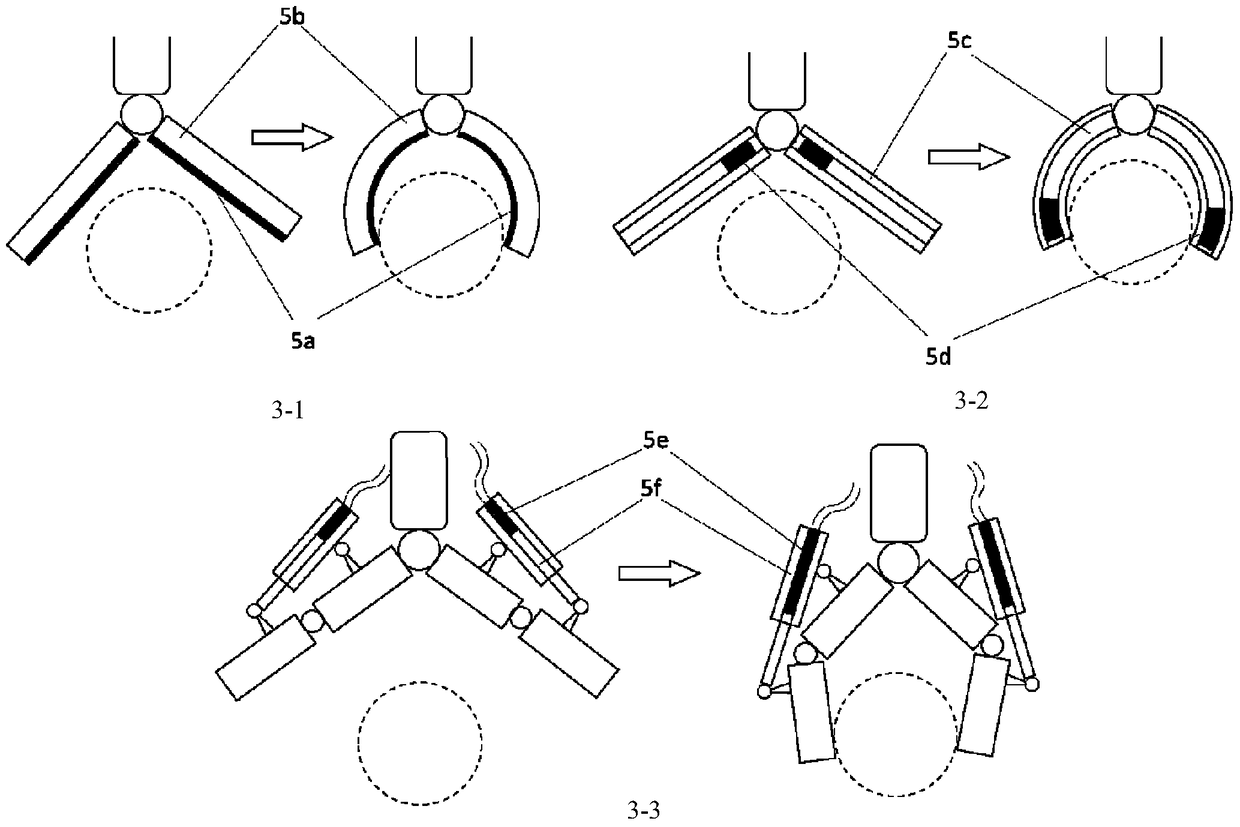
[0084] Wherein the energy storage device uses a lithium battery as an energy source to provide electric energy for the arm actuator 4 and the hand actuator 5 . In this embodiment, the hand actuator uses image 3 In the scheme 3-1, the liquid metal film 5a is coated on the surface of the flexible substrate 5b by spraying or smearing and printing. When an electric field is applied to the liquid metal, the surface tension changes, which drives the flexible substrate to bend, and then forms the object to be operated. The clamping, combined with the movement of the arm actuator, can realize the handling and other actions ...
Embodiment 2
[0087] see figure 1 , the basic composition of the robot is the same as that of the first embodiment, and the difference from the first embodiment is that the hand actuator 5 uses image 3 In the scheme 3-2, when the hand actuator is not clamped, the hand actuator is shown on the left side of 3-2, the liquid metal material 5d is inside the hollow pipe 5c, and the liquid metal material 5d is located at the far end when it is not clamped The position of the head, the pipe is not deformed. When clamping is required, the liquid metal is transported to the end of the hand actuator 5 by the action of the pump to increase the quality of the end, and the hand actuator 5 bends under the action of gravity to clamp the object to be operated.
Embodiment 3
[0089] see figure 1 , the basic composition of the robot is the same as that of the first embodiment, and the difference from the first embodiment is that the hand actuator 5 uses image 3 In the middle 3-3 scheme, the hydraulic rod using liquid metal as the working medium is used to drive the hand actuator 5, wherein 5e is the liquid metal material, and 5f is the hydraulic rod. When the liquid metal material starts to fill the hydraulic rod, it will push the hydraulic pressure. The rod is elongated, and then the hand actuator 5 is bent, and then the object to be operated is clamped.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More