

Self-adaptive control method for large-curved-surface grinding
An adaptive control and grinding technology, which is applied in the direction of adaptive control, general control system, grinding machine tool parts, etc., can solve the problem that it is difficult to ensure the integrity and consistency of workpiece shape and surface quality, and affect the efficiency and positioning of grinding. Inconsistent dimensions and other issues, to achieve the effect of maintaining spring deformation, improving grinding efficiency, and improving grinding accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] Further describe the present invention below in conjunction with embodiment and accompanying drawing.
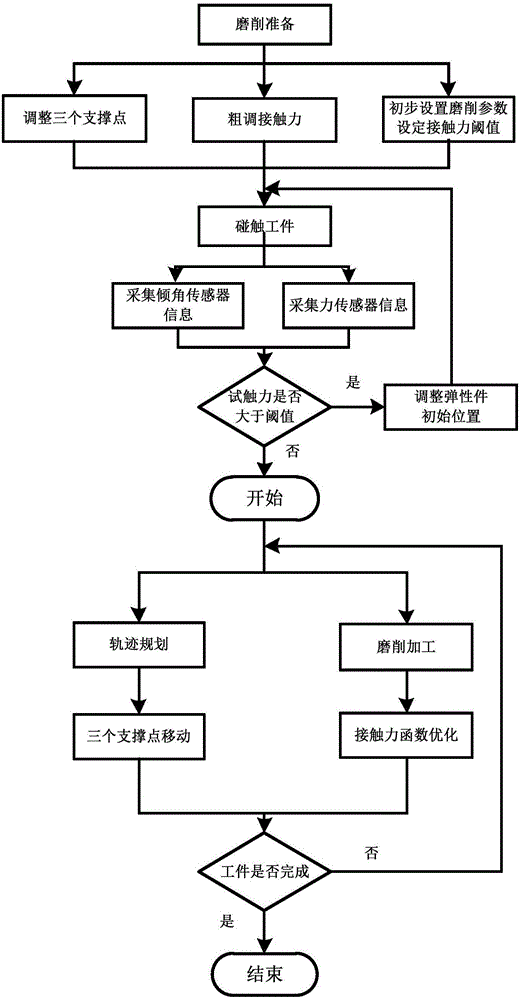
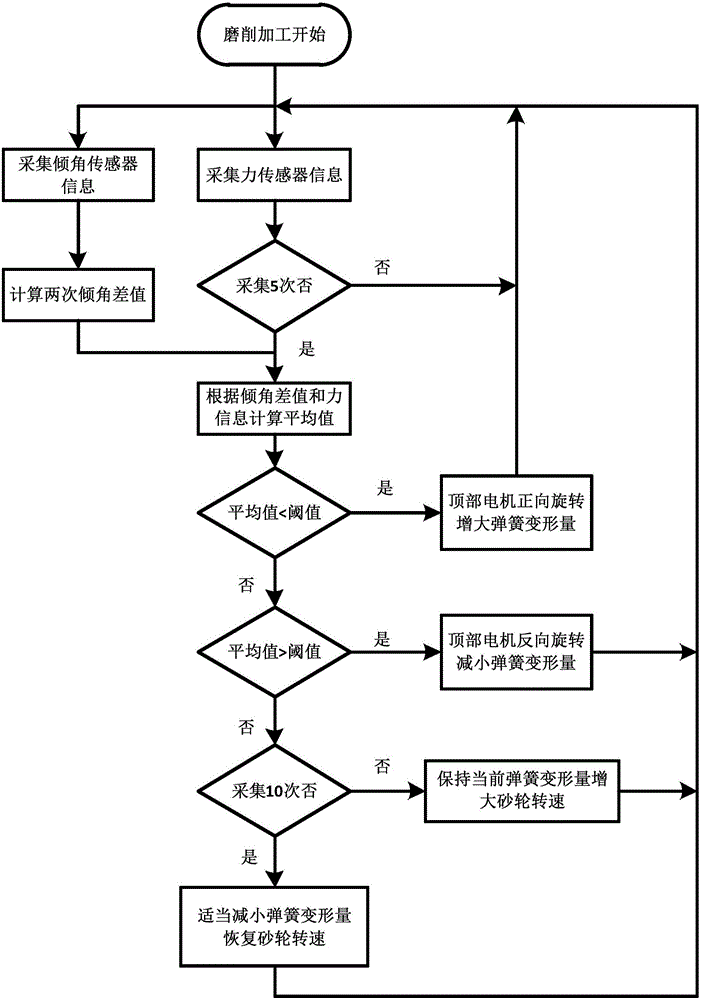
[0026] The large curved surface grinding adaptive force control method designed by the present invention (method for short, see figure 1 and 2 ), the method specifically includes the following steps:
[0027] The first step is grinding preparation; before the grinding process starts, first determine a minimum surface that fits the workpiece as much as possible by adjusting the positions of the three support points to meet the grinding requirements of workpieces with different curvatures, and then pre-tighten the threads The device is used to roughly adjust the size of the contact force, reducing the adjustment time of the contact force and improving efficiency.
[0028] Further, perform preliminary parameter setting. A touch screen is designed in the control system, and the preset and display boxes of grinding wheel speed, feed speed, feed depth and other grinding ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More