Motion control system for four-wheel individual drive patrolling device
A four-wheel independent drive, motion control system technology, applied in the direction of the guidance device of space navigation vehicle, extraterrestrial vehicle, etc., can solve the problem that the design of the motion control system of the patrol vehicle is not introduced in detail, the volume and mass of the vehicle body are large, and the reliability and reliability are affected. Flexibility and other issues to achieve the effect of improving real-time performance and reliability, compact structure, and preventing sand and dust interference
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] Below in conjunction with specific example and accompanying drawing, the present invention will be further described:
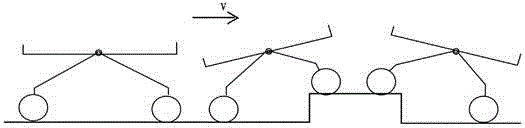
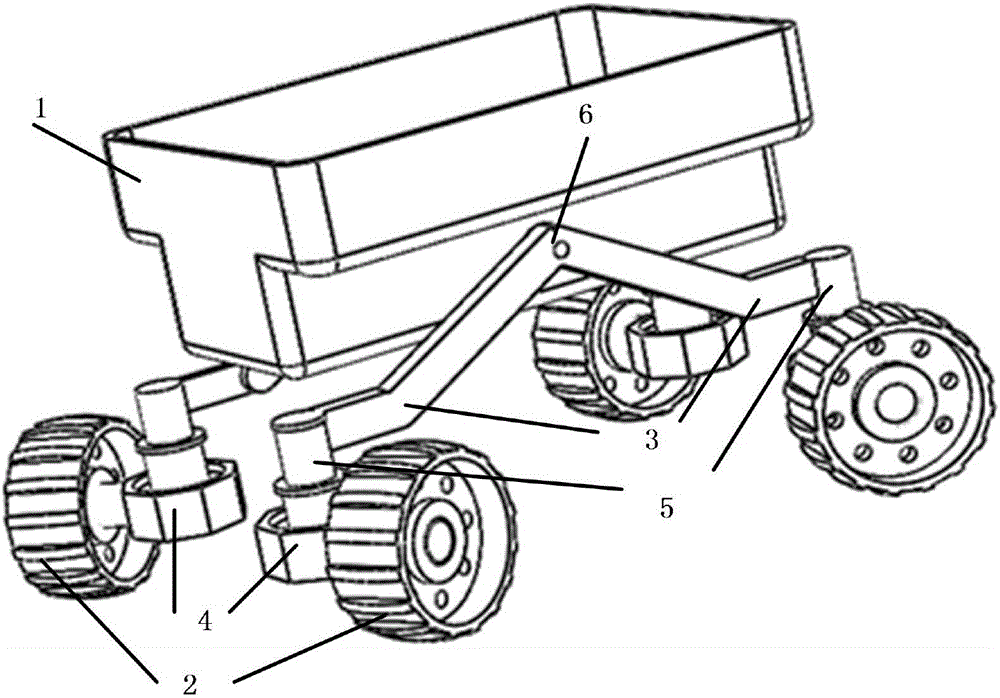
[0030] figure 1 It shows the overall structure of the four-wheel independent drive patrol device of the present invention. When the patrol device moves on a rough road surface, the patrol device will automatically adjust the angle of the rocker arm 3 according to the change of the road surface conditions, so that the patrol device can better adapt to the road surface The change of the situation keeps the stable work of the detection instrument in the patrol car 1. The movement process of the patrol device on the rough road is as follows: Figure 6 shown.
[0031] figure 2 A schematic diagram of the wheel composition is shown. The motors are installed inside the wheels to ensure that the motors are not disturbed by the external environment. The unique structural design can ensure that the wheels can turn at any radius, such as Figure 5 shown. Bo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More