

SINS/DVL/ES combined navigation method based on information pre-evaluation and compensation correction
A technology of combined navigation and navigation method, which is applied in the field of tracking and positioning, and can solve problems affecting the accuracy of SINS navigation and positioning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0048] As stated above, while the invention has been shown and described with reference to certain preferred embodiments, this should not be construed as limiting the invention itself. Various changes in form and details may be made therein without departing from the spirit and scope of the invention as defined by the appended claims.
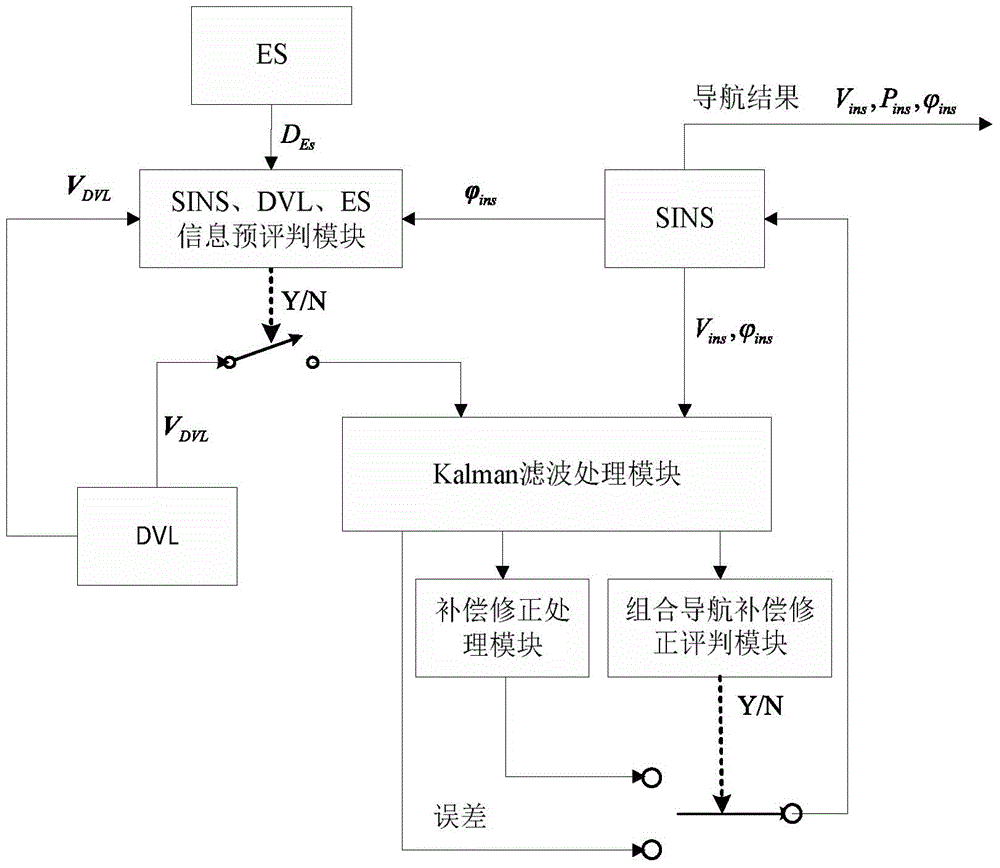
[0049] As attached to the manual figure 1 Shown, the present invention is made up of following 7 parts:
[0050] The present invention consists of SINS (Strapdown Inertial Navigation Systems, strapdown inertial navigation system, SINS for short) installed on the underwater AUV (Autonomous Underwater Vehicle, autonomous underwater vehicle, referred to as AUV), DVL (Dopplervelocitylog, Doppler velocity log, DVL for short), ES (Echo-Sounder, depth sounder, ES for short), SINS / DVL / ES information pre-judgment module, Kalman filter processing module, integrated navigation compensation correction judgment module and compensation correction processin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More