

Uuv virtual speed control method based on bio-inspired model
A bio-stimulation and speed control technology, applied in adaptive control, general control system, control/regulation system, etc., can solve the problem of UUV speed control instability and achieve the effect of maintaining stable performance and reducing noise
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0034] Specific Embodiment 1: The UUV virtual speed control method based on the biological stimulation model described in this embodiment will be combined below Figure 1 to Figure 4 This embodiment will be further described in detail. The UUV virtual speed control method based on the biological stimulation model comprises the steps:
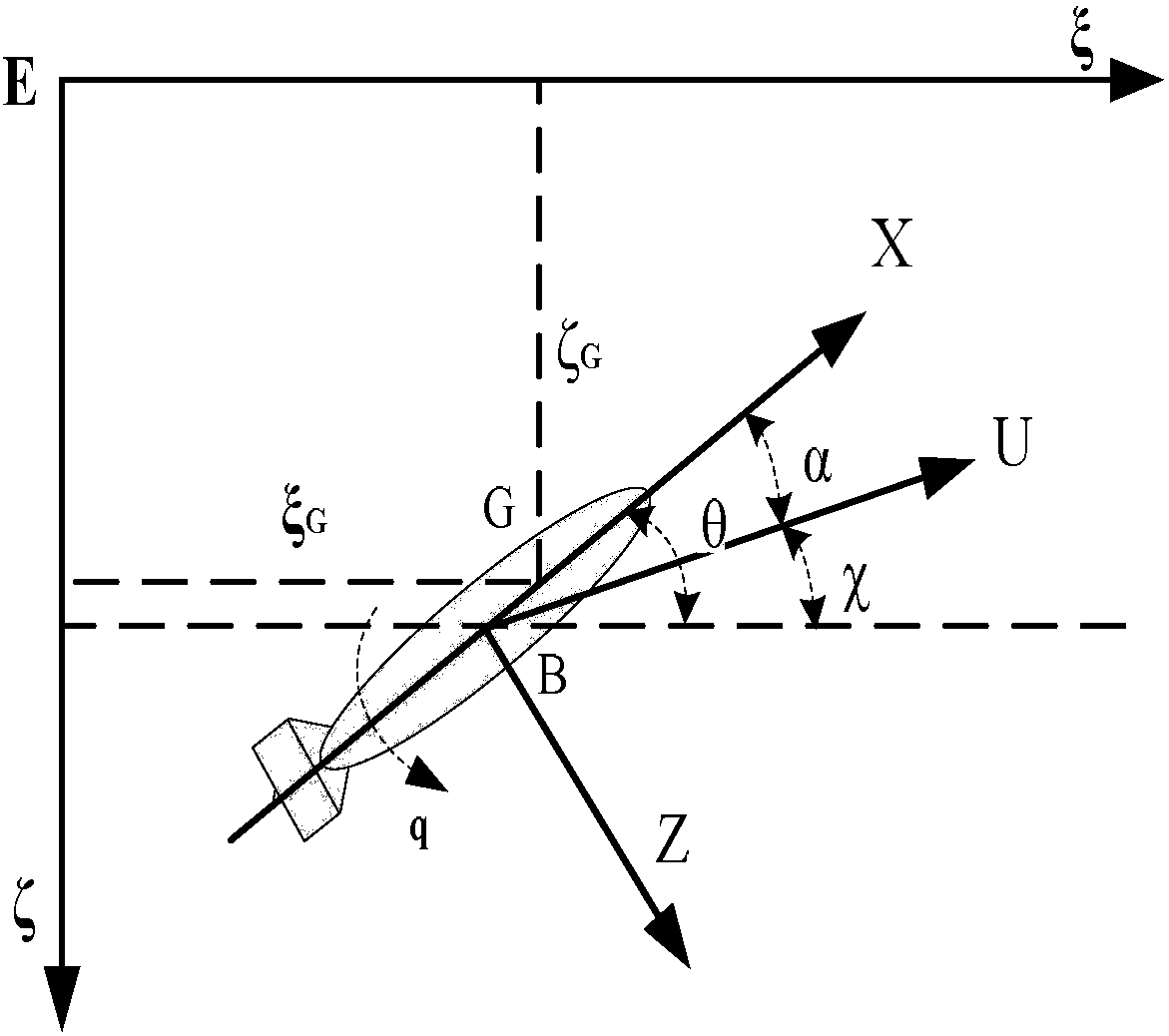
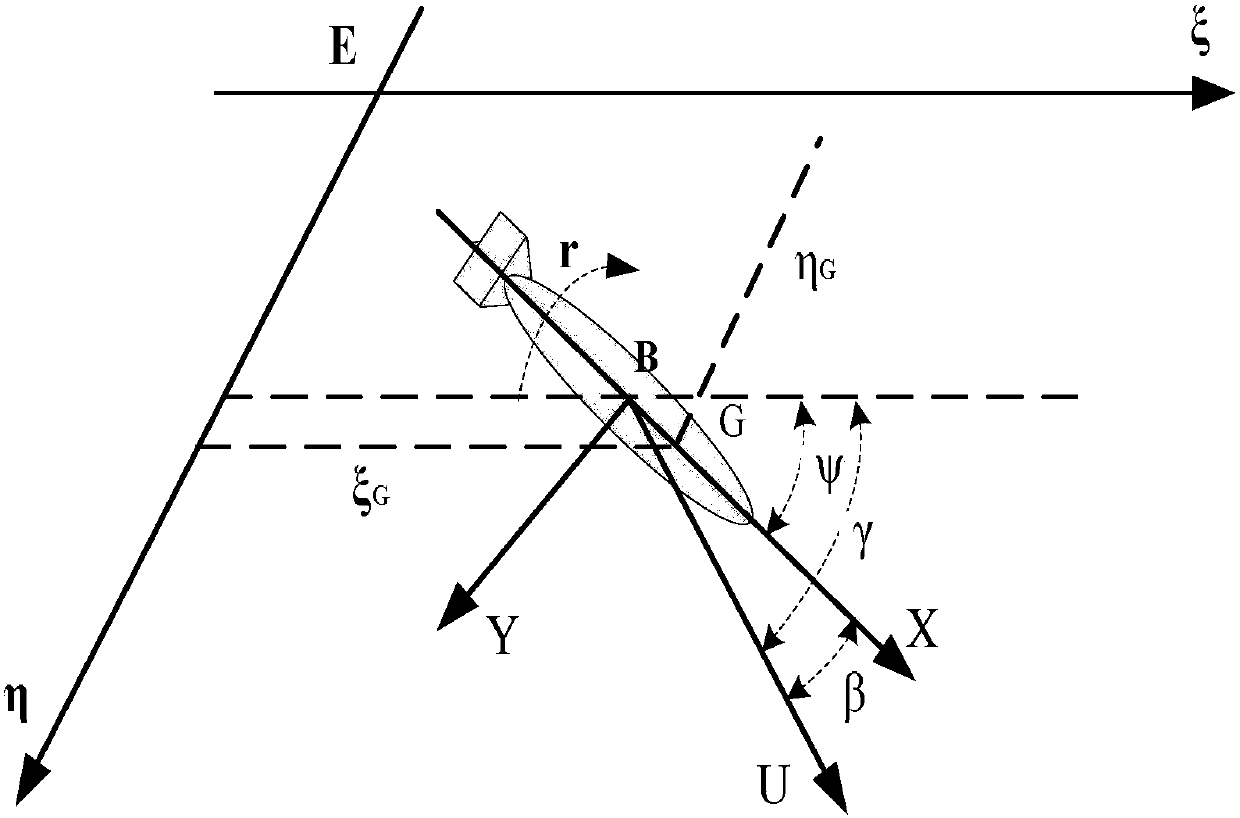
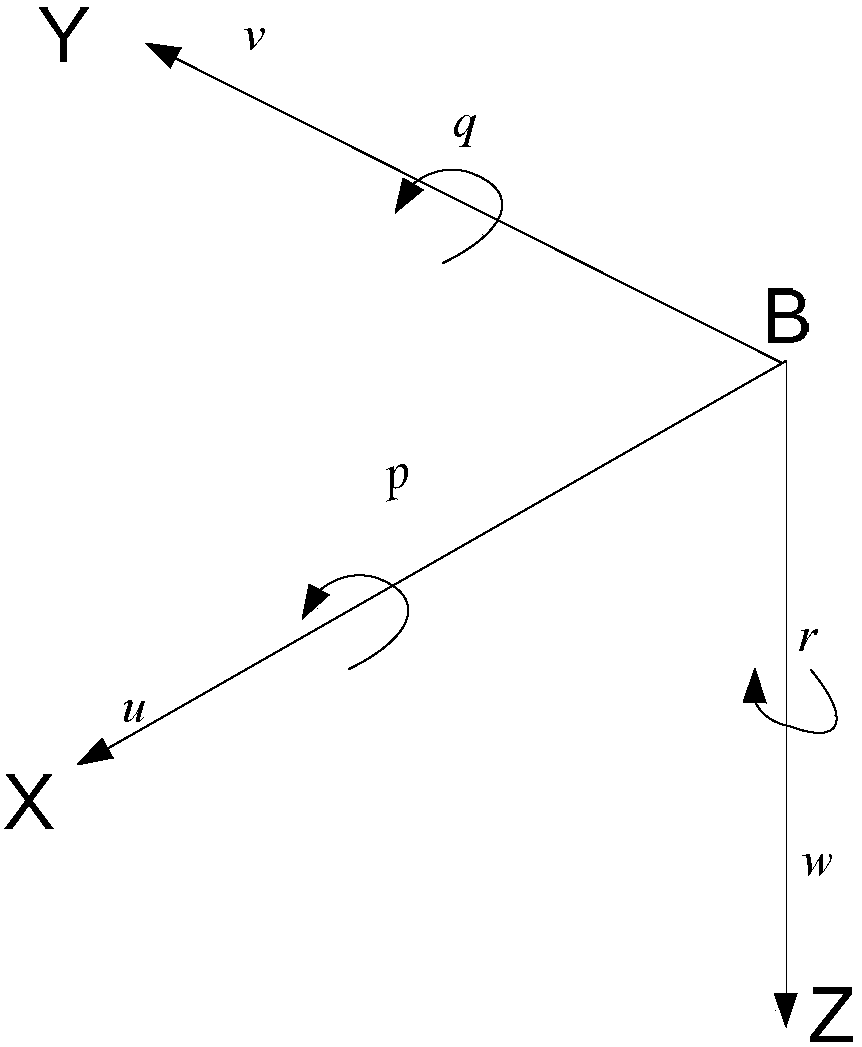
[0035] Step 1: According to the kinematics model, the velocity nonlinear equation of the underactuated UUV in three-dimensional space motion is established, and the relationship between the velocity of the UUV in the fixed coordinate system {E} and the hull coordinate system {B} is obtained;
[0036] For the convenience of analysis, this embodiment makes the following assumptions for the UUV navigation model: (1) the UUV speed is a non-negative value, that is, the speed control during reverse travel is not considered; (2) the influence of rolling motion is ignored; (3) all The considered UUV object is left-right symmetric. In the UUV motion an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More