Method of controlling slave station servo driver synchronization master station
A technology of servo driver and master station, applied in program control, computer control, general control system, etc., can solve problems such as servo motor jitter
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The present invention will be described in further detail below in combination with specific embodiments and with reference to the accompanying drawings.
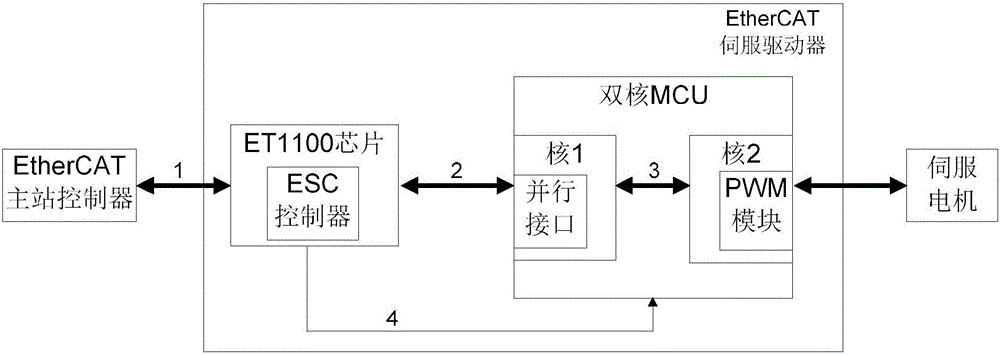
[0020] Such as figure 1 Shown is a schematic structural diagram of the drive control system in this specific embodiment. The drive control system includes EtherCAT master station controller, EtherCAT servo drive and servo motor. Wherein, the EtherCAT servo driver includes a hardware chip containing an ESC controller (in this specific embodiment, the hardware chip of ET1100), which is mainly used for communicating with the EtherCAT master station controller and performing data interaction with the first core of the dual-core MCU. The first core in the dual-core MCU is used to interact with the ESC controller to receive real-time position, speed, and torque commands, and transmit the received real-time position, speed, and torque commands to the second core after analyzing them. The second core in the dual-core MCU i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More