High-speed multi-body mechanism driven by cables in parallel
A high-speed, parallel technology, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of high cost, reduced precision of lightweight terminals, and difficulties in processing and manufacturing, and achieve the effect of reducing mass, compact structure, and improving efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The working principle of the planar parallel mechanism, which is the core part of this design, will be introduced in detail below in conjunction with the accompanying drawings.
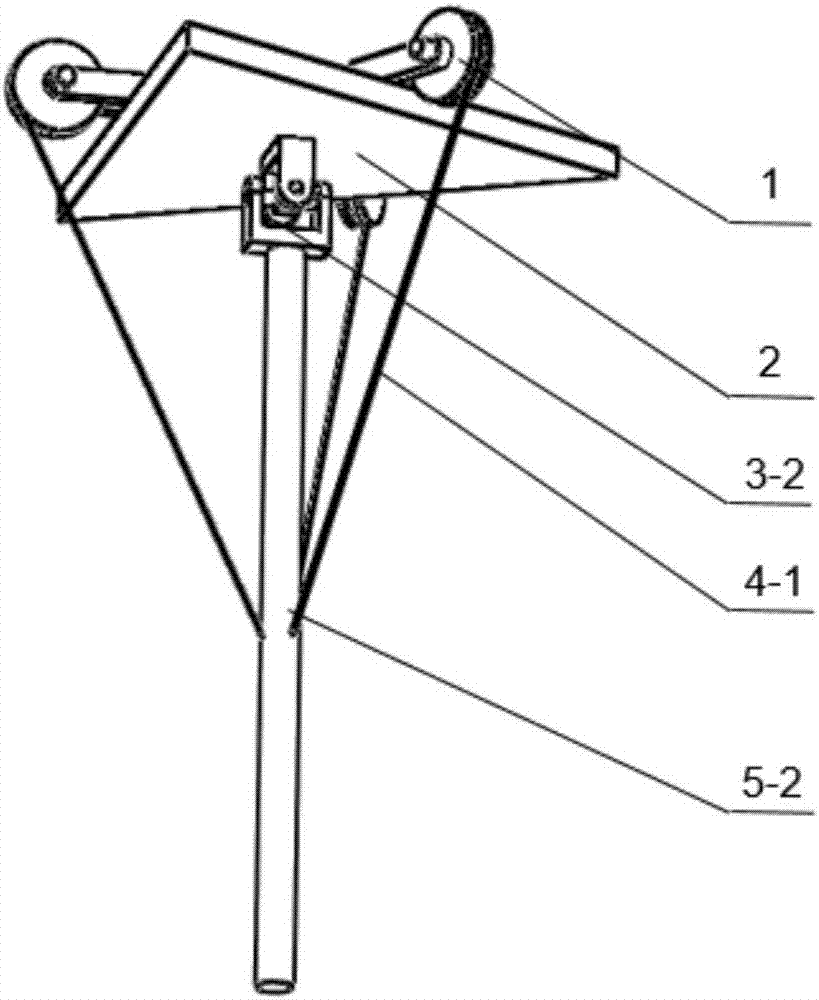
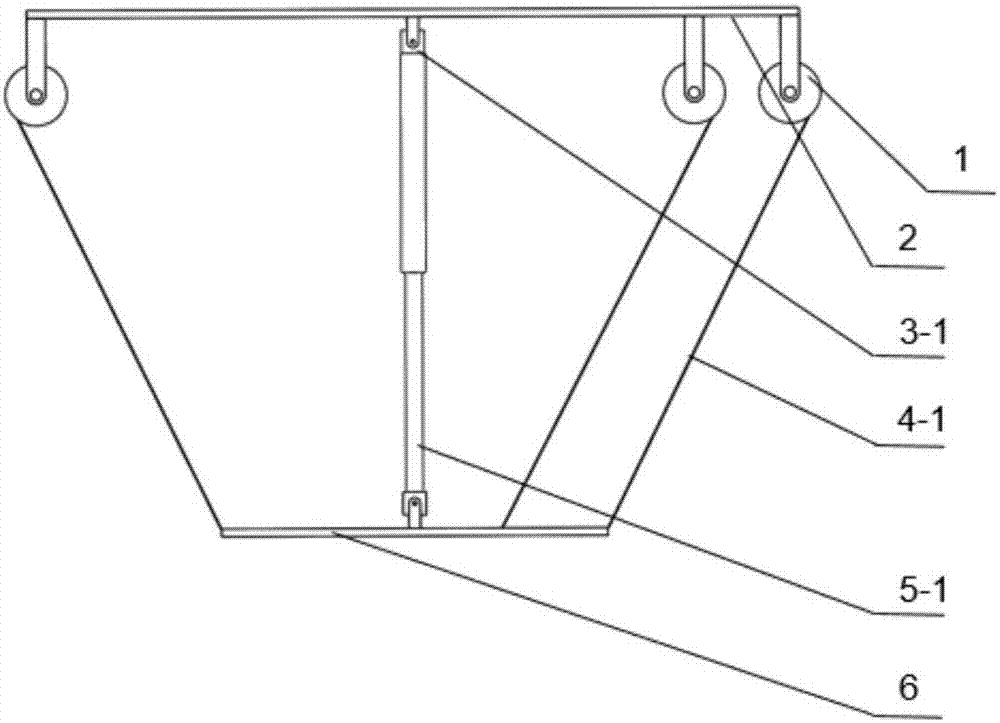
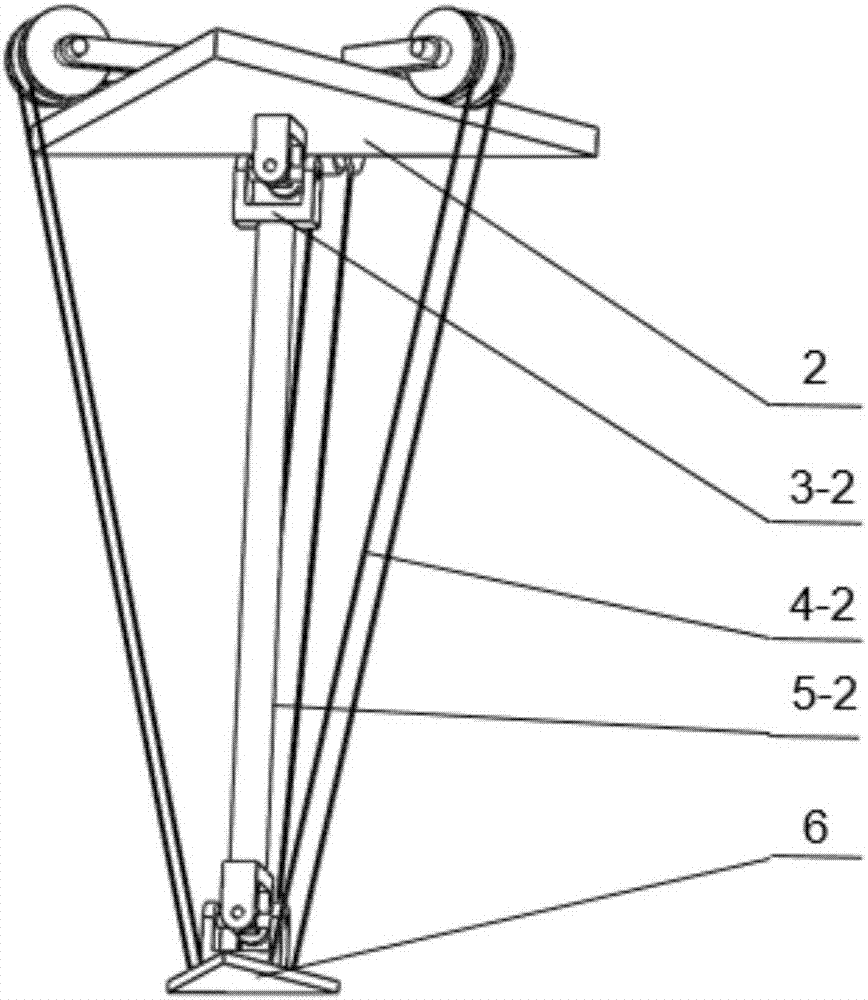
[0027] Such as figure 1 As shown, the cable-driven planar two-degree-of-freedom high-speed multi-body mechanism is composed of a static platform 2, a drum and a driving unit 1, a rope 4-1, a rigid telescopic rod 5-1, a rotating hinge 3-1, and a moving platform 6. The rigid telescopic rod One end of 5-1 is connected with static platform 2 by rotating hinge 3-1, and the other end is connected on the moving platform 6 by rotating hinge 3-1. The drum and drive unit 1 are mounted on a static platform 2 . The rope 4-1 is wound on the drum and the driving unit 1, and the extension and contraction of the rope 4-1 is realized by controlling the rotation of the drum and the driving unit 1. Wherein the two groups of ropes on the right form parallel cable systems to ensure that the dynamic platform 6 and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More