

Obstacle-crossing crawling robot and driving method thereof
A technology of a crawling robot and a driving method, which is applied in the fields of motor vehicles, transportation and packaging, can solve the problems of difficulty in popularization and application, and achieve the effects of small possibility of self-interference, strong controllability of deformation and simple structure.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] Embodiments of the present invention will be described in detail below with reference to the accompanying drawings.
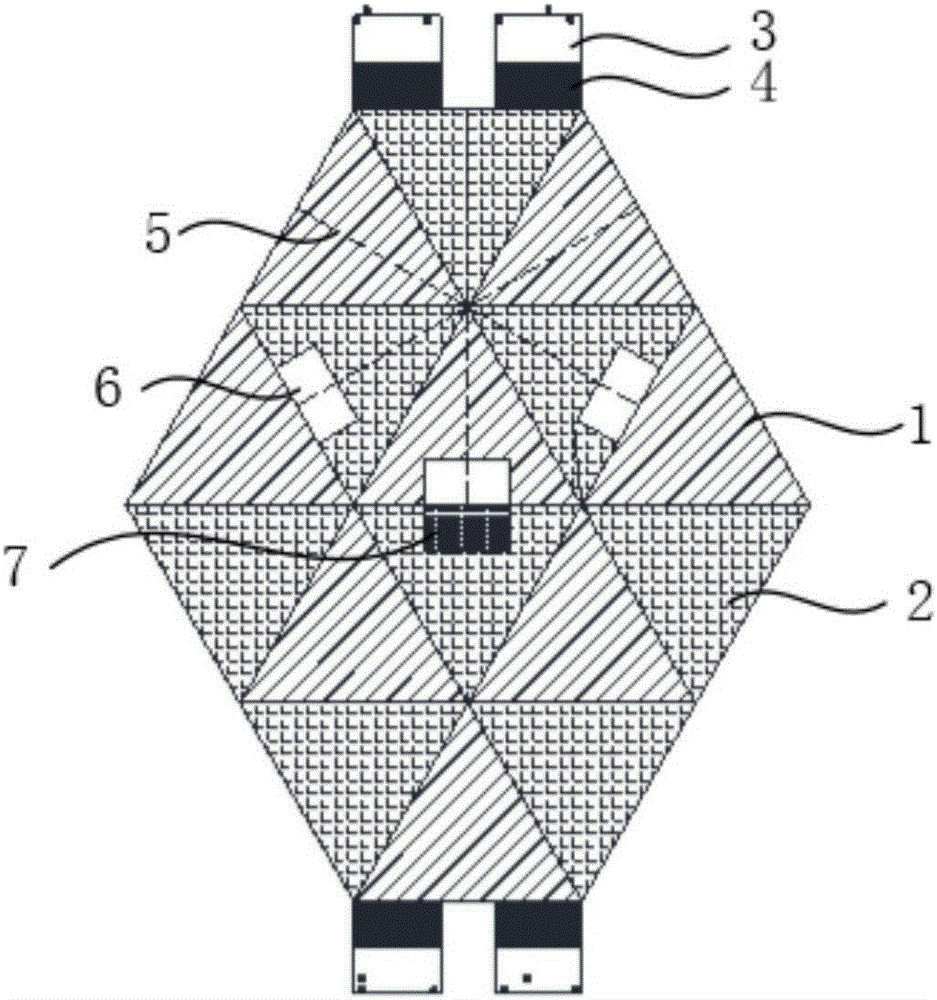
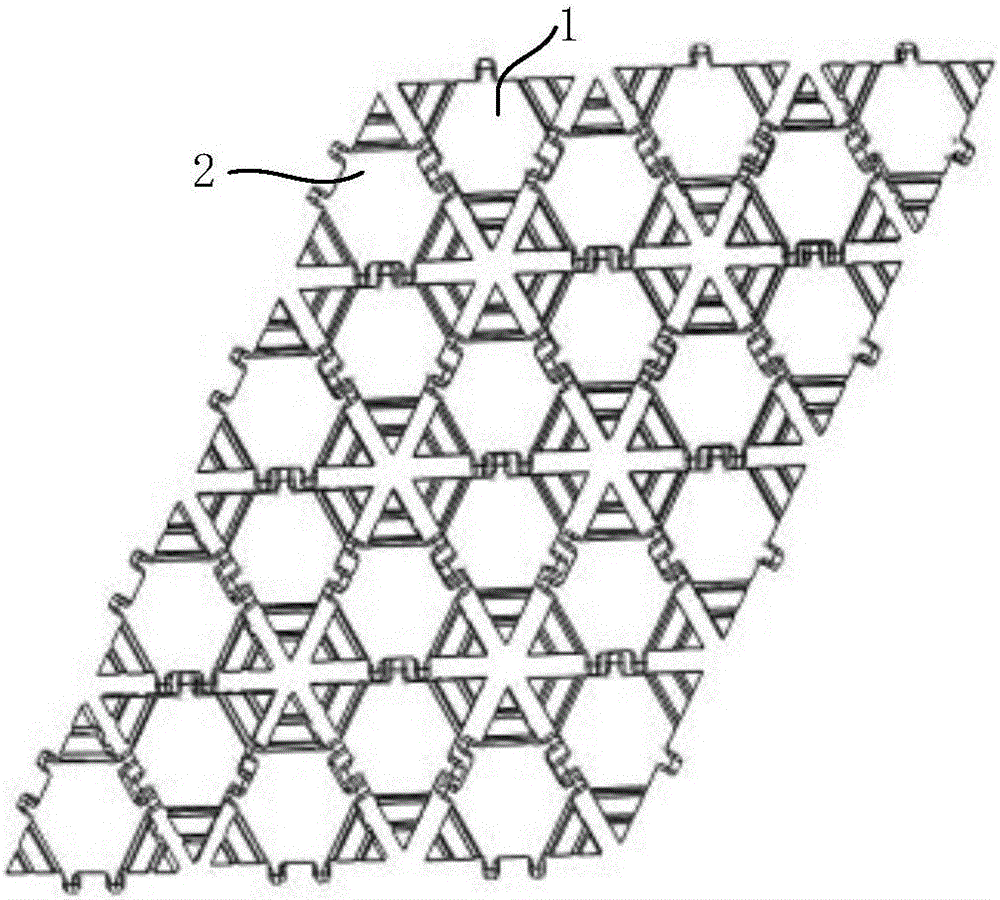
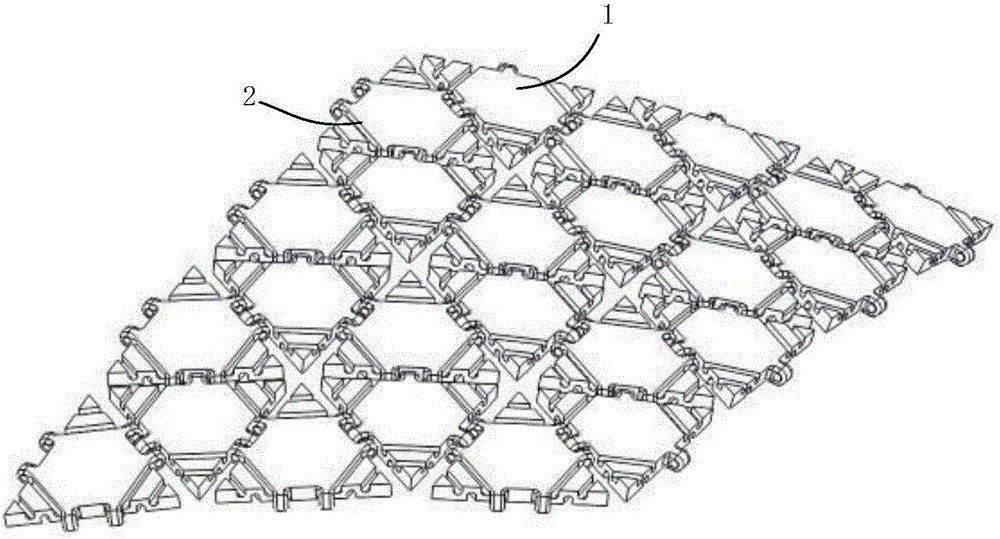
[0027] like figure 1 As shown, the present invention provides an obstacle crawling robot, including: a driving module and a plurality of interconnected crawling components; the crawling component includes a first module 1 and a second module 2; the first module 1 and the second module The two modules 2 are connected by a recovery module; the shapes of the first module 1 and the second module 2 are equilateral triangles; wherein, at least one crawling assembly also includes a pulling module 5 and a transmission shaft, the transmission shaft Rollers 3 are arranged at both ends; the driving module connects the pulling module 5 and the transmission shaft (the transmission shaft and the recovery device are not shown in the figure).
[0028] An obstacle-climbing crawling robot provided by an embodiment of the present invention uses a modular structure of mult...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More