

Two-axis pod system based on geographic coordinate system pointing control
A geographic coordinate system, pointing control technology, used in control/regulation systems, attitude control, non-electric variable control and other directions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
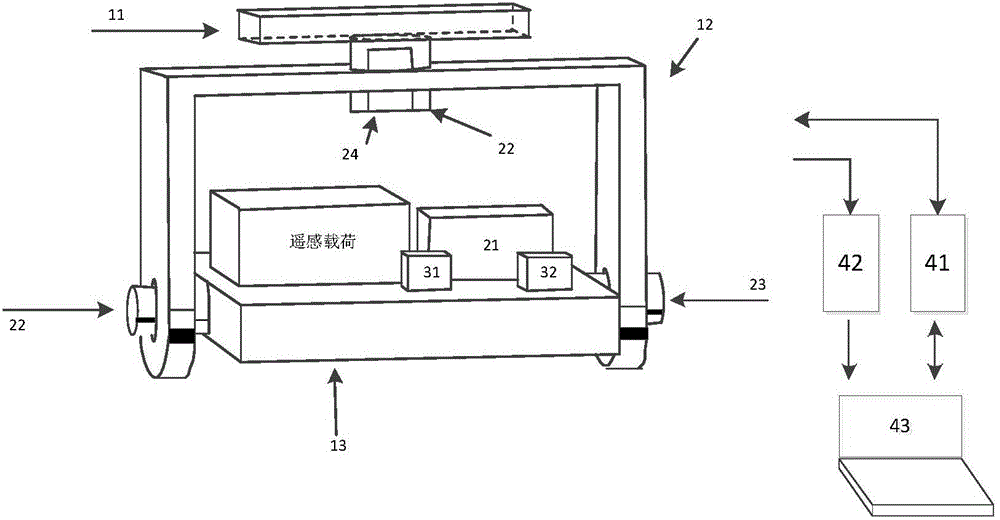
[0027] Such as figure 1 As shown, the present invention mainly comprises two-axis pod structure system (1), measurement and control unit (2), transmission system (3) and ground monitoring station (4), measurement and control unit (2) and transmission system (3) installation and two On the shaft pod structure system (1);
[0028] The two-axis pod structure system (1) is composed of a base plate (11), an azimuth frame (12) and a pitch frame (13). It is connected between the two-axis pod system and the moving carrier to isolate the non-ideal high-frequency motion interference of the moving carrier. The azimuth frame (12) is used as the outermost ring of the two-axis pod system to carry the pitch frame system to realize the two-axis pod system. The rotation of the azimuth direction of the system further affects the deflection of the visual axis of the remote sensing load in the azimuth direction under the geographical coordinate system. The rotation of the pod system in the pitc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More