

Method of constructing smart vehicle EPS-used AC motor anti-interference smart controller
An intelligent controller and AC motor technology, applied in the direction of motor generator control, electronic commutation motor control, electromechanical brake control, etc., can solve uncertain disturbance design robust controller, EPS motor system parameters time-varying, difficult to apply Intelligent car EPS AC motor and other issues, to achieve the effect of improving static control performance, easy engineering implementation, and excellent control effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
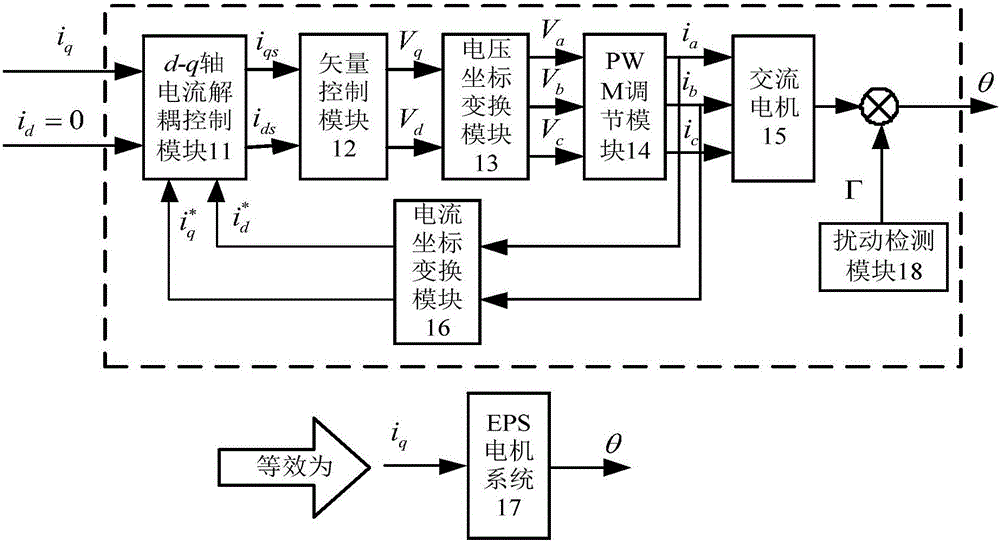
[0020] like figure 1 As shown, the invention connects the d-q axis current decoupling control module 11, the vector control module 12, the voltage coordinate transformation module 13, the PWM regulation module 14 and the AC motor 15 in series in sequence, and together with the current coordinate transformation module 16 and the disturbance detection module 18 as a The EPS motor system 17 is formed as a whole. The EPS motor system 17 controls the current i with the q axis q and d-axis control i d As the input, the rotor position angle is the output θ. Among them, the i d The value is set to 0, i.e. i d =0. The two reference inputs of the d-q axis current decoupling control module 11 are the current i q and i d , i d = 0, the two reference inputs i q and i d Respectively with the two currents output by the current coordinate transformation module 16 and By comparison, the two outputs of the d-q axis current decoupling control module 11 are obtained as two current v...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More