

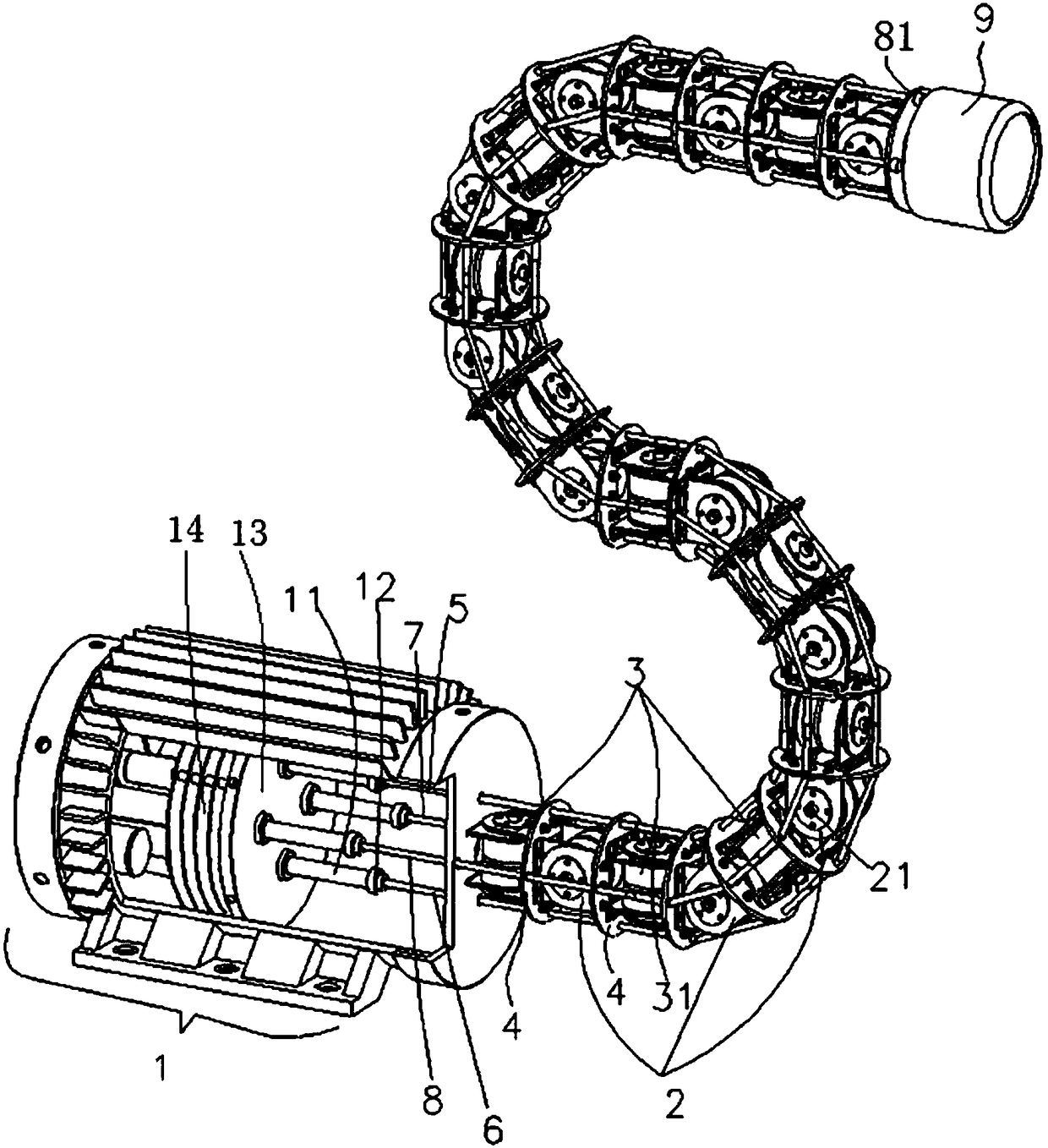
Multi-joint flexible robotic arm
A mechanical arm, multi-joint technology, applied in the field of robots, can solve the problems of complex control system, complex installation structure, high energy consumption, etc., and achieve the effect of good interchangeability, strong flexibility, and reduced manufacturing and maintenance costs.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] Embodiments of the multi-joint flexible robotic arm of the present invention will be described below with reference to the accompanying drawings. Those skilled in the art would recognize that the described embodiments can be modified in various ways or combinations thereof without departing from the spirit and scope of the invention. Accordingly, the drawings and description are illustrative in nature and not intended to limit the scope of the claims. Also, in this specification, the drawings are not drawn to scale, and like reference numerals denote like parts.
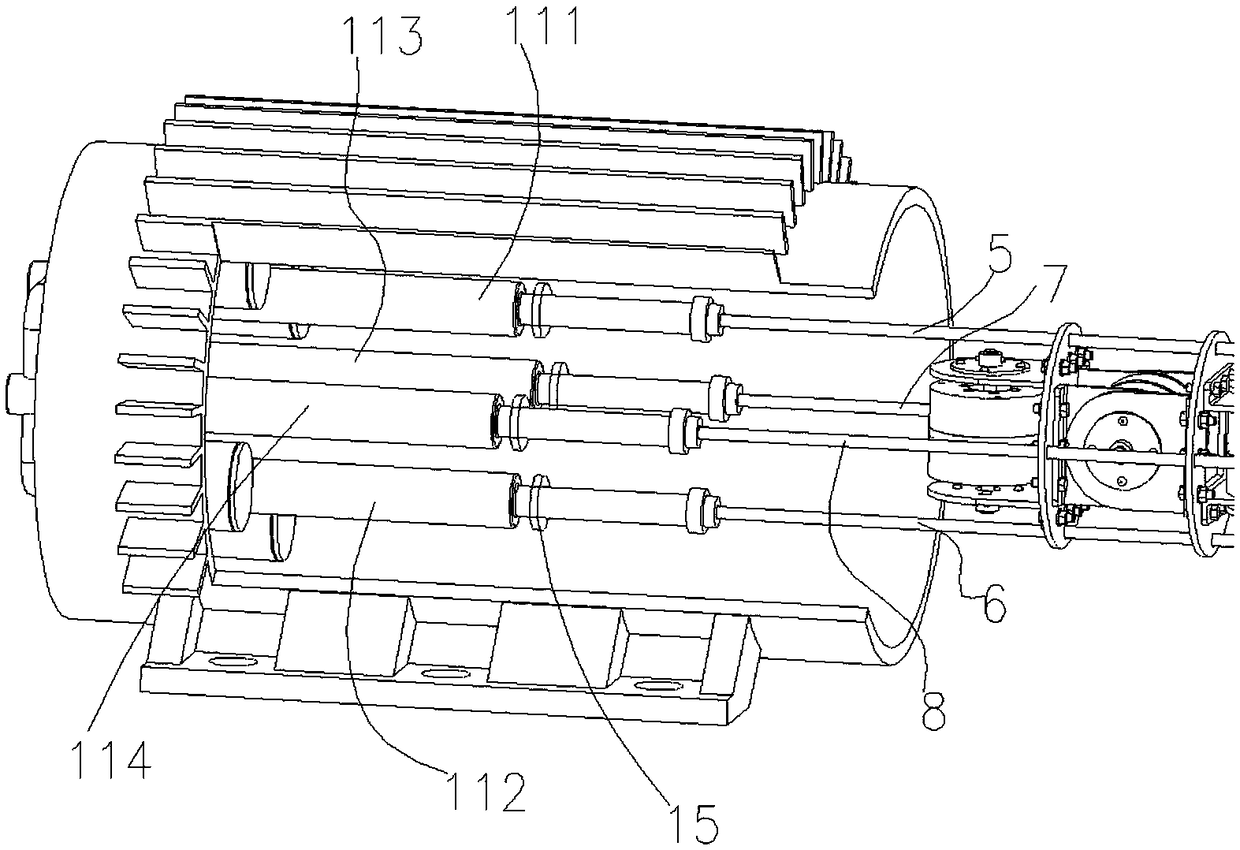
[0023] Most multi-joint robotic arms use joint motors to drive the movement of each joint. Therefore, each joint requires a joint motor, which has a complex installation structure and consumes a lot of power. However, the present invention provides a mechanical arm that can be driven by an electric push rod. Its power sources are arranged in a centralized manner and are small in number, which can drive the en...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More