

Operation robot and mechanical arm thereof
A technology of a manipulator and a connector, applied in the field of manipulators, can solve the problems of large size, complex structure of manipulators, poor operation convenience, etc., and achieve the effects of improving motion control accuracy, simplifying structural relationships and easy operation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
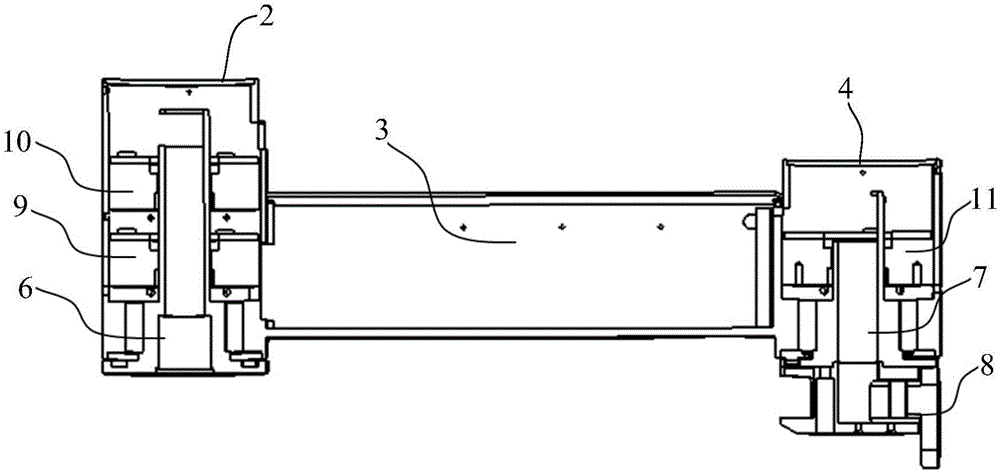
[0052] In order to make the objects, advantages and features of the present invention clearer, the following are combined with the appendix Figures 1 to 11 The surgical robot and its mechanical arm proposed by the present invention will be further described in detail. It should be noted that, the accompanying drawings are all in a very simplified form and in inaccurate scales, and are only used to facilitate and clearly assist the purpose of explaining the embodiments of the present invention.
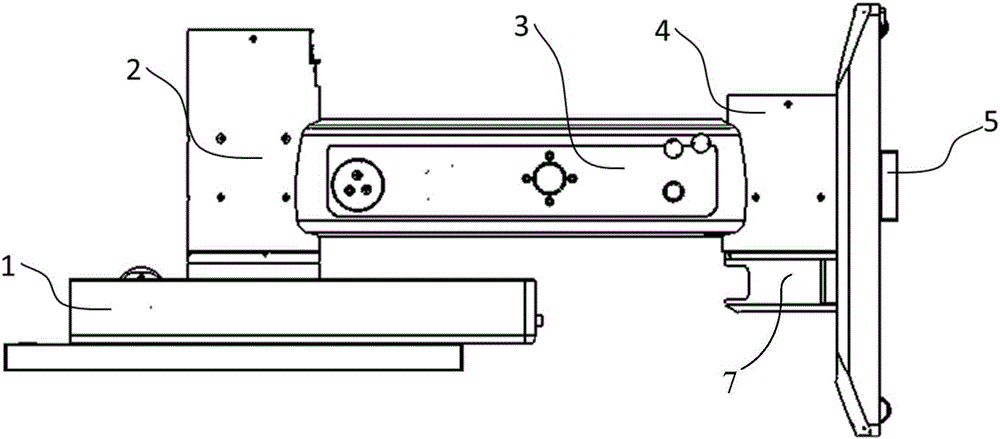
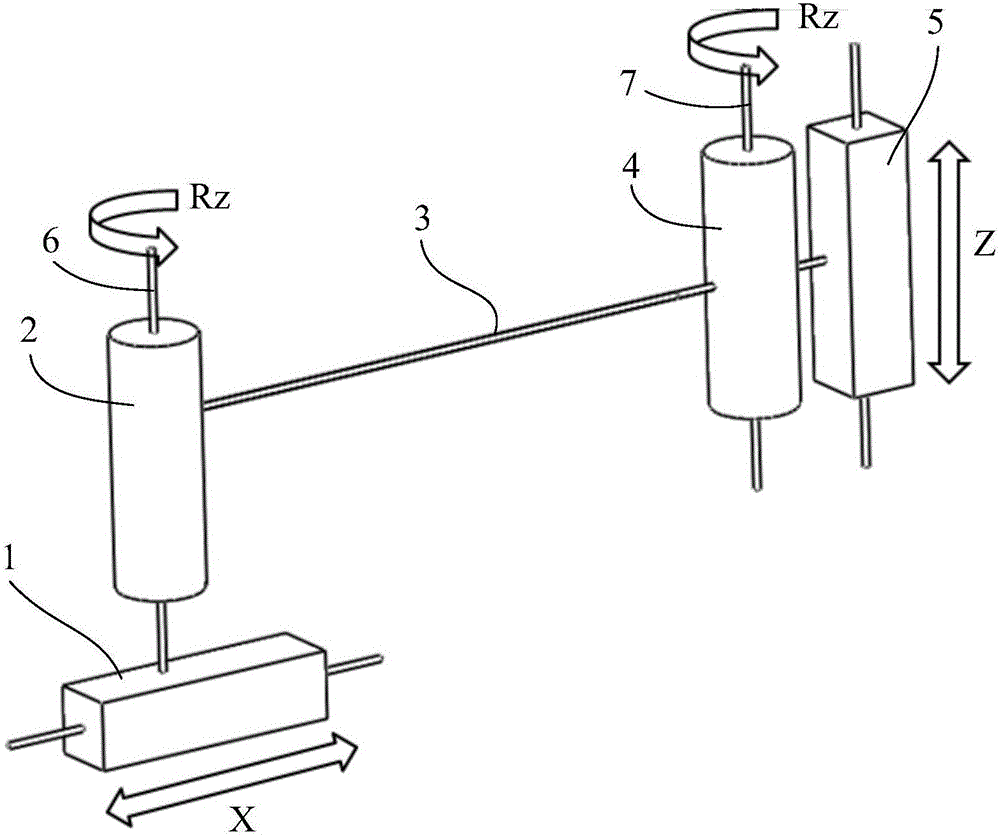
[0053] figure 1 is an overall schematic diagram of a robotic arm according to an embodiment of the present invention, figure 2 Yes figure 1 Schematic diagram of the motion directions of the various joints of the robotic arm shown.
[0054] like Figures 1 to 2 As shown, a mechanical arm is suitable for a surgical robot, especially a micro-traumatic surgical robot, especially the patient side of a micro-traumatic surgical robot, which can realize spatial motion, including: a horiz...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More