

Precision hydraulically-driven joint for robot based on closed-loop control
A closed-loop control and robot technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve problems such as high manufacturing costs, increased wear of parts, and increased reverse hysteresis
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings.
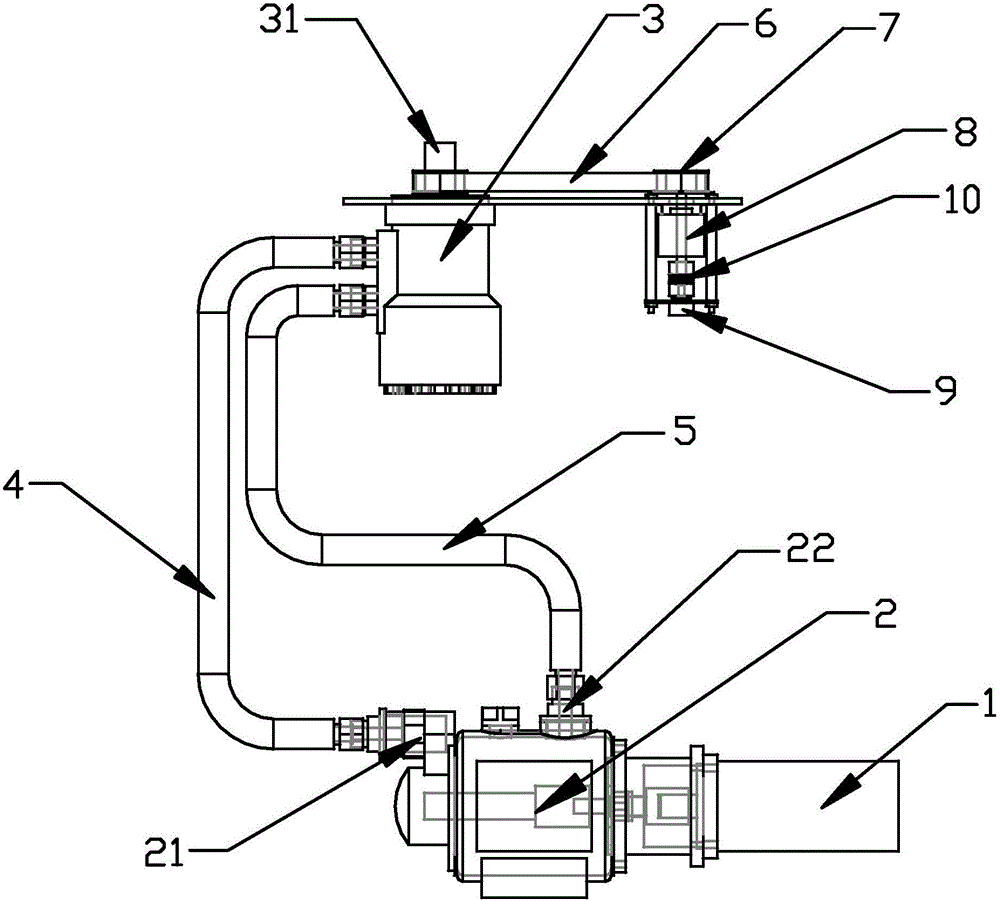
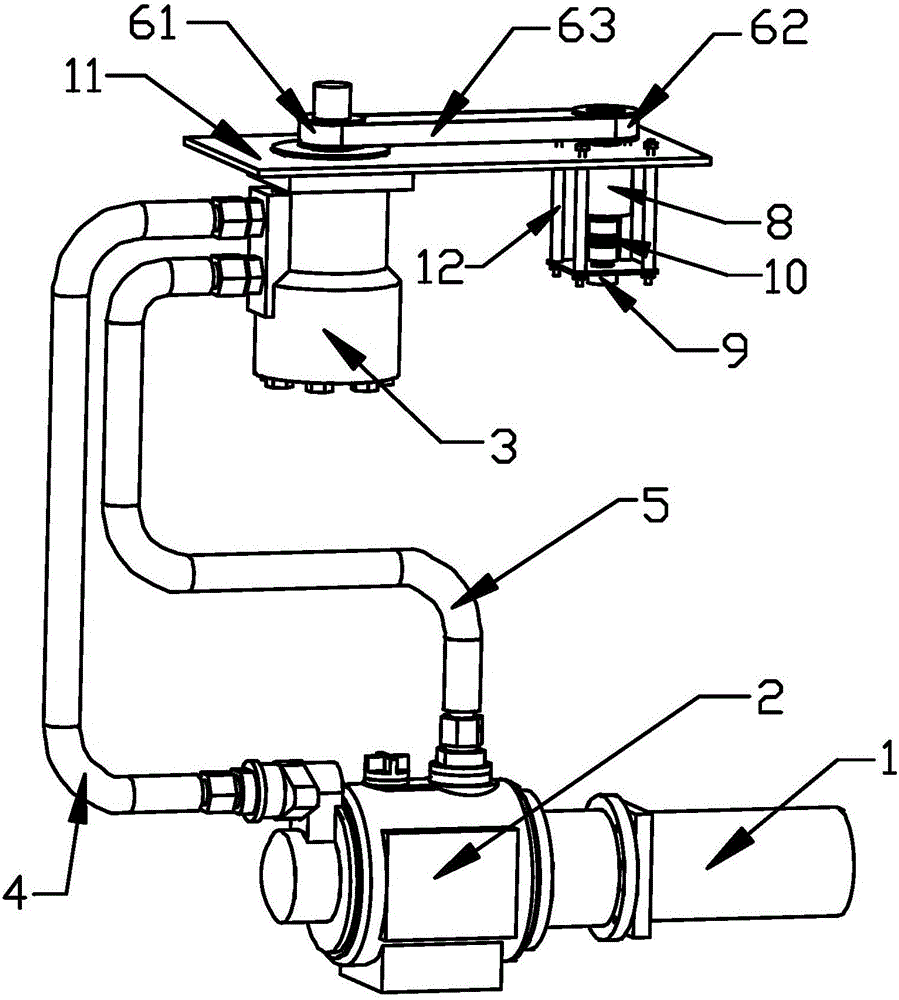
[0034] Such as figure 1 , figure 2 As shown, the closed-loop control-based robot uses precision hydraulic drive joints, including a closed-loop control system and a rotary joint for the robot. The closed-loop control system includes a single-chip microcomputer, a motor driver, a servo motor 1, a two-way screw pump 2, and a swing hydraulic cylinder 3 , and an electric detection system that detects the precise rotation angle of the output shaft of the swing hydraulic cylinder 3; the single-chip microcomputer controls the rotation of the servo motor 1 through the motor driver, and the servo motor 1 drives the screw in the two-way screw pump 2 forward Or reverse rotation, the two-way screw pump 2 has a first output end 21 on one side and a second output end 22 on the other side, the inner chamber of the swing hydraulic cyl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More