

Expert PID control method applied to rotary electromechanical actuator servo system
An electromechanical actuator and servo system technology, applied in the field of servo control, can solve problems such as increased system overshoot, difficulty in reconciling rapidity and overshoot, stability and anti-interference, and reduced anti-interference , to achieve the effect of improved dynamics, good control effect, and improved steady-state time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention is described below in conjunction with the accompanying drawings.
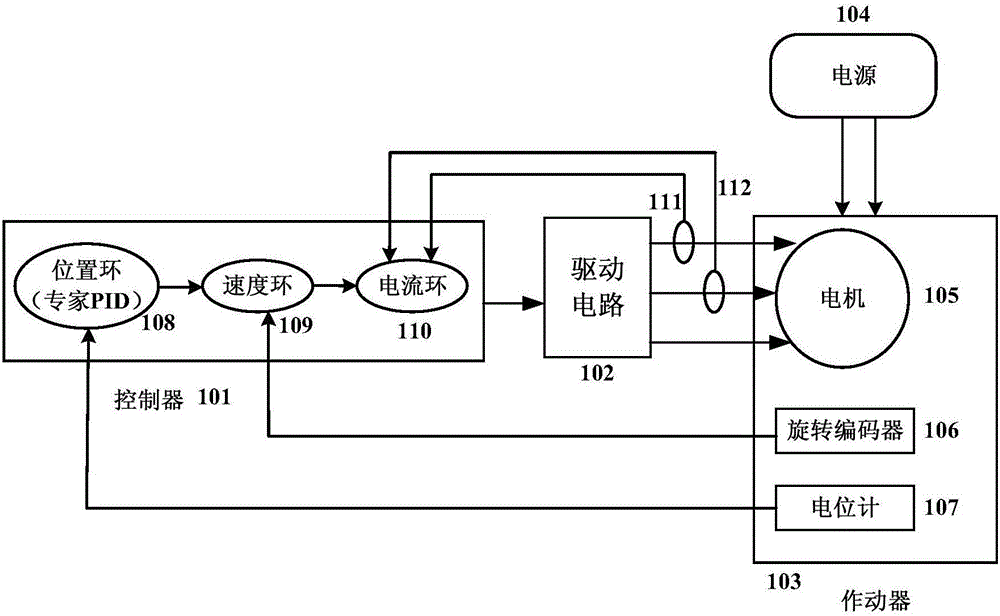
[0028] Such as figure 1 As shown, the servo applying the rotary electromechanical actuator is composed of a controller 101 , a driving circuit 102 , a rotary electromechanical actuator 103 and a power supply 104 . The controller is composed of position loop expert PID108, speed loop 109, and current loop 110, and the rotary electromechanical actuator is composed of motor 105, rotary encoder 106, and potentiometer 107. The controller 101 receives instructions from the host computer, and receives the displacement, speed, and current information fed back by the rotary encoder 106, potentiometer 107, and current sensors 111, 112, and completes the three-loop control of the position loop 108, speed loop 109, and current loop 110. The PWM control rate is generated, the power is amplified by the drive circuit 102, and is used to drive the rotary electromechanical actuator 103 to perform ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More