

Barrier-free patrolling robot system and method for overhead ground wire
A technology for inspection robots and overhead ground wires, which is applied in the direction of overhead lines/cable equipment, manipulators, manufacturing tools, etc., can solve problems such as low efficiency of obstacle crossing, low safety factor, and difficult control, so as to ensure online safety and structure Simple, easy-to-install effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
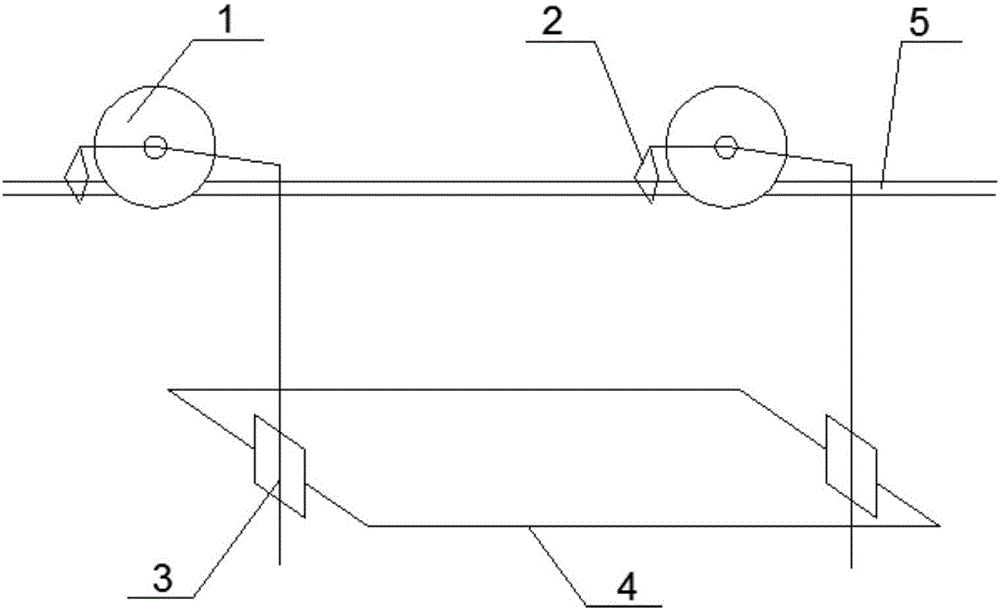
[0039] A full-range inspection robot for overhead ground wires and a barrier-free ground wire passage, including a full-range inspection robot and a barrier-free ground wire passage suitable for the robot;
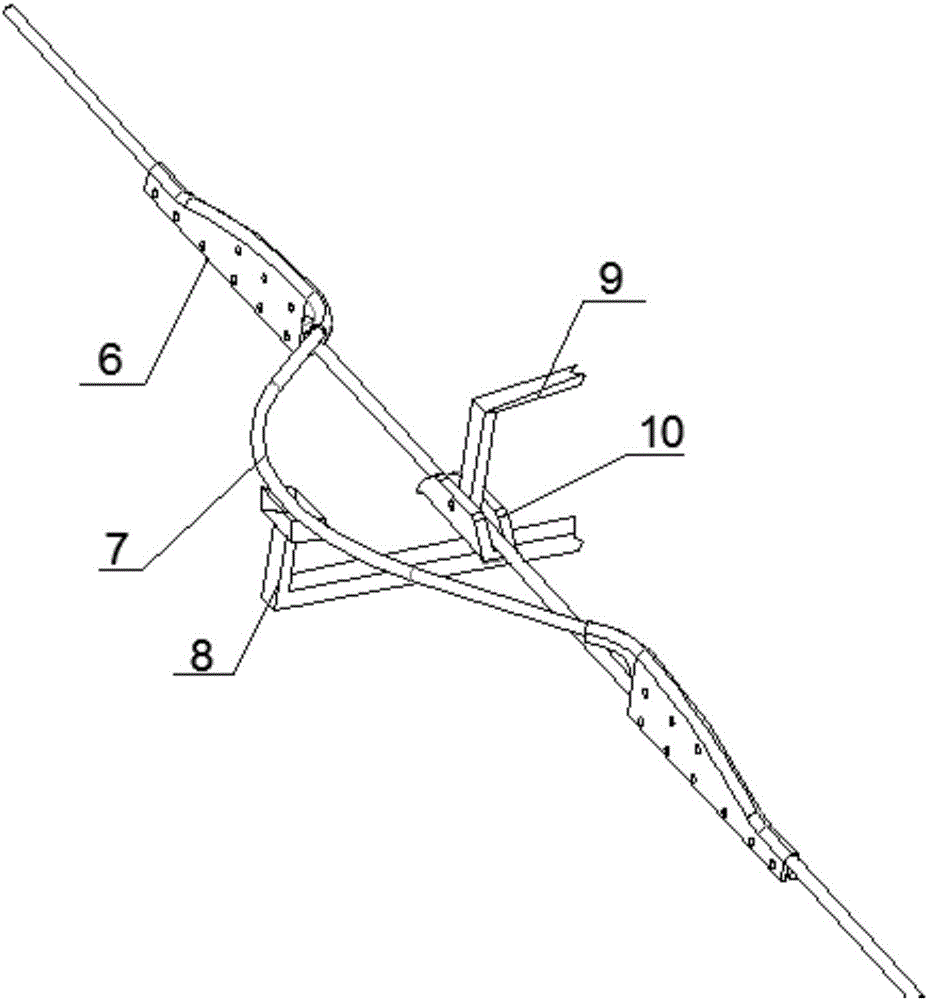
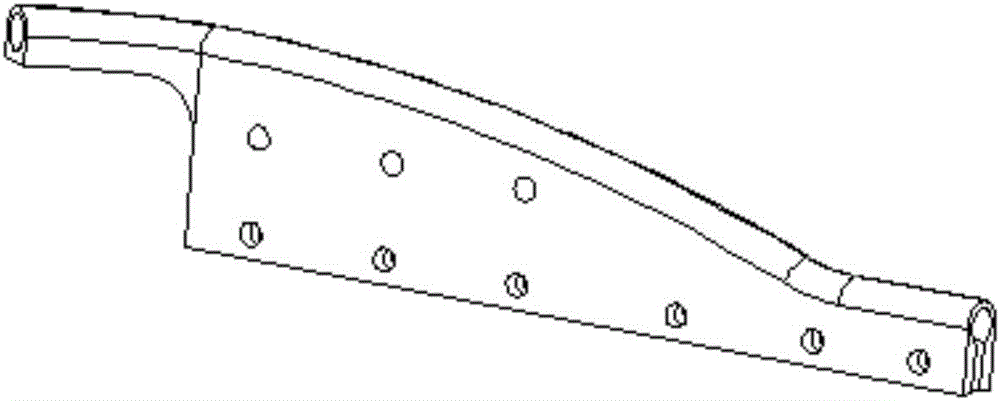
[0040] The overhead ground wire full inspection robot and the barrier-free ground wire channel adapt to each other and complement each other. The full inspection robot includes a driving wheel, a clamping wheel, a rotary joint and a frame. There are two driving wheels, which ride on the ground wire respectively; There are two clamping wheels, which are respectively installed and fixed on the front part of the driving wheel; a rotary joint is connected below each driving wheel, and the rotary joint is fixed on the frame.
[0041] The barrier-free ground passage includes the transformation of the barrier-free passage on the straight pole tower and the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More