

High-precision multi-axis motion three-dimensional micro-welding robot
A welding robot and multi-axis linkage technology, applied in the field of robots, can solve the problems of low welding pass rate, poor adaptability, and manual work, etc., and achieve strong welding applicability, reliable welding quality, and fast welding speed Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, and are not intended to limit the present invention.
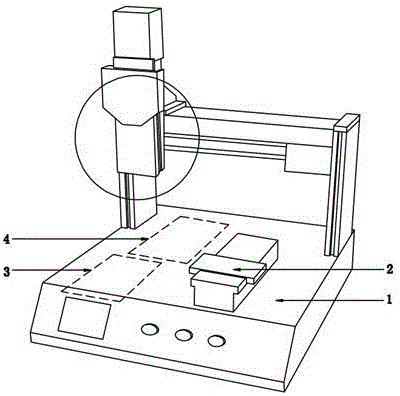
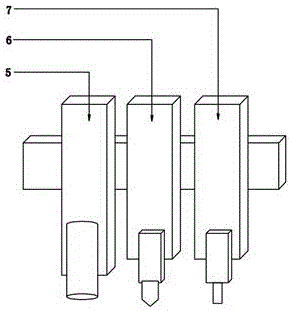
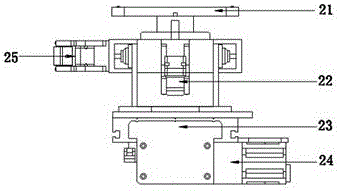
[0051] see Figure 1-Figure 2 , the specific implementation method adopts the following technical solutions: a high-precision multi-axis linkage three-dimensional micro-welding robot, which includes a main machine 1, a three-dimensional three-dimensional rotating platform 2, a central control system 3, a high-precision direct drive transmission system 4, and a high-precision machine vision Positioning system 5, high-performance graphite material superconducting welding system 6, high-precision ultra-micro dispensing system 7, the bracket of the host 1 is equipped with a hi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More