

Filtering method and device for point cloud data
A technology of point cloud data and filtering algorithm, applied in the field of data processing, can solve the problems of increasing labor cost and poor effect, and achieve the effect of ensuring accuracy and precision and improving filtering efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
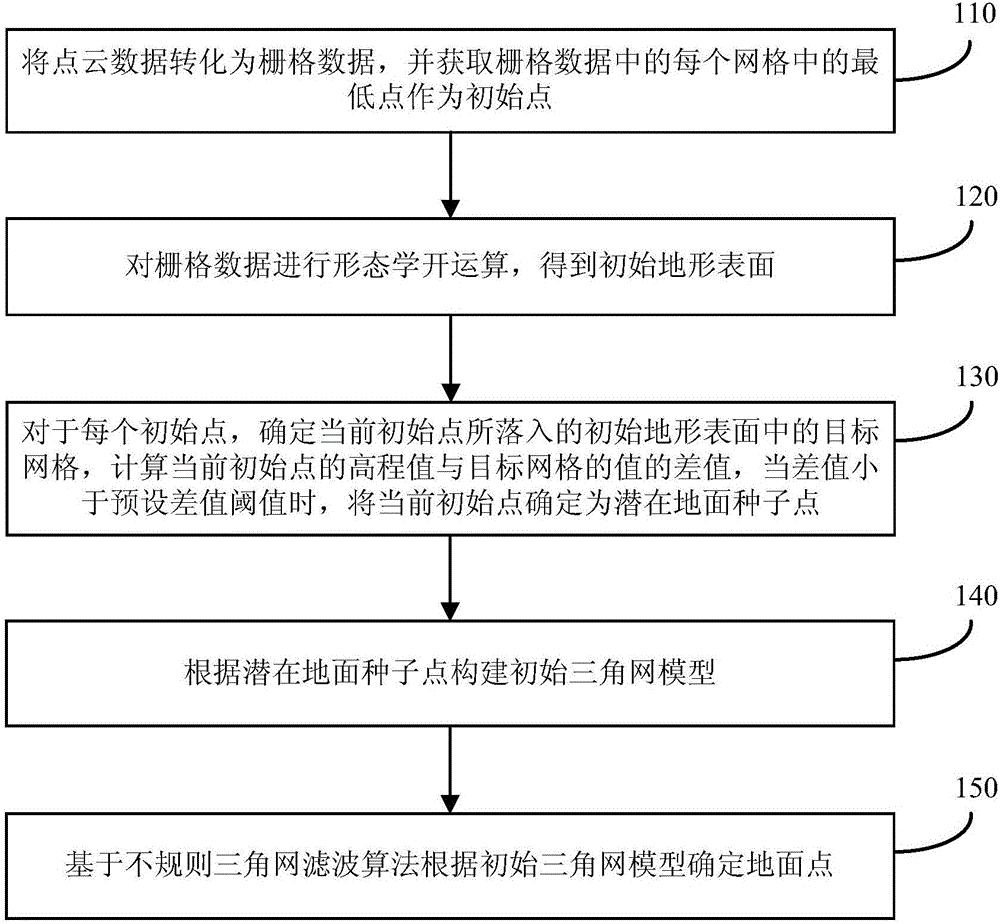
[0039] figure 1 It is a schematic flow chart of a point cloud data filtering method provided by Embodiment 1 of the present invention. The method can be executed by a point cloud data filtering device, wherein the device can be implemented by software and / or hardware, and generally can be integrated in a terminal such as a computer middle. like figure 1 As shown, the method includes:
[0040] Step 110, converting the point cloud data into raster data, and obtaining the lowest point in each grid in the raster data as an initial point.
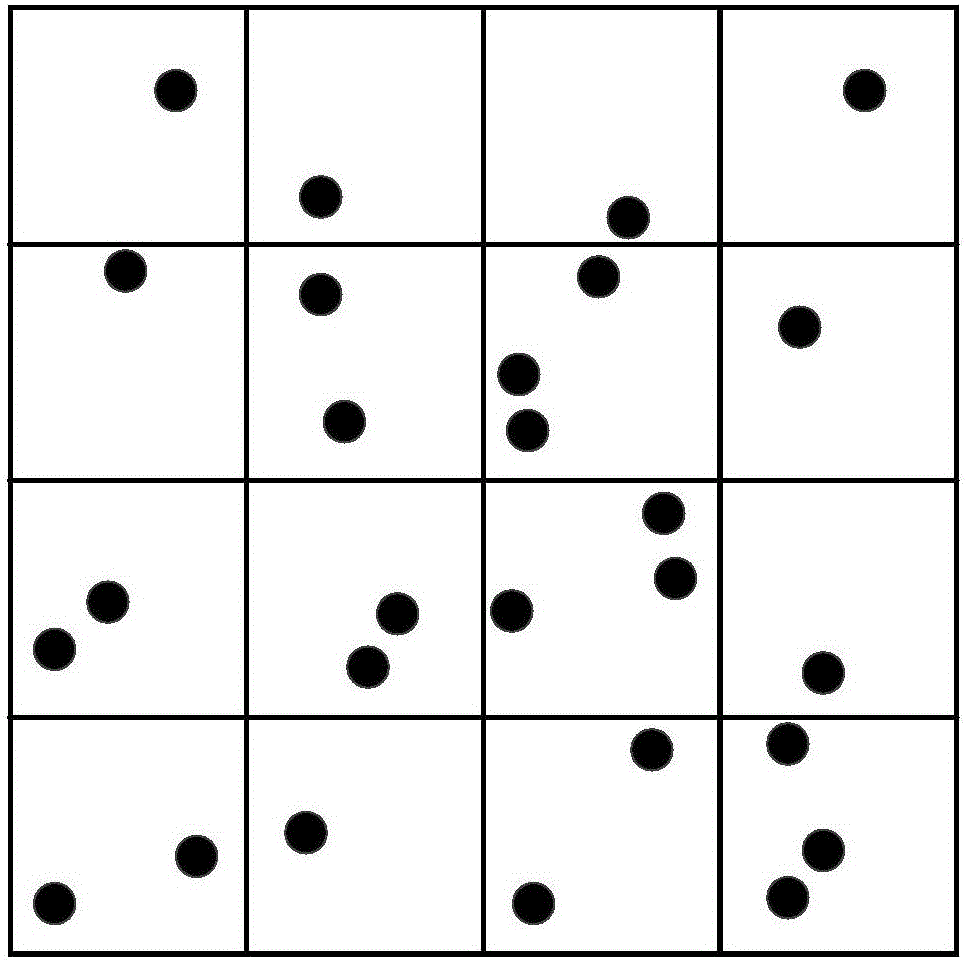
[0041] Exemplarily, rasterization processing is performed on the point cloud data to obtain raster data. For example, point cloud data can be divided into rectangular grid rules to obtain raster data. In this embodiment, the precision of rasterization processing can be set according to actual requirements, for example, the size of each grid can be 1 meter*1 meter. figure 2 A schematic diagram of a grid provided in Embodiment 1 of the prese...
Embodiment 2
[0053] Figure 5 It is a schematic flow chart of a point cloud data filtering method provided by Embodiment 2 of the present invention. This embodiment is optimized on the basis of the above-mentioned embodiments. In this embodiment, the step "according to the potential ground seed point and the initial ground seed Points to build an initial triangulation model" has been optimized.
[0054] Correspondingly, the method of this embodiment includes the following steps:
[0055] Step 510, converting the point cloud data into raster data, and obtaining the lowest point in each grid in the raster data as an initial point.
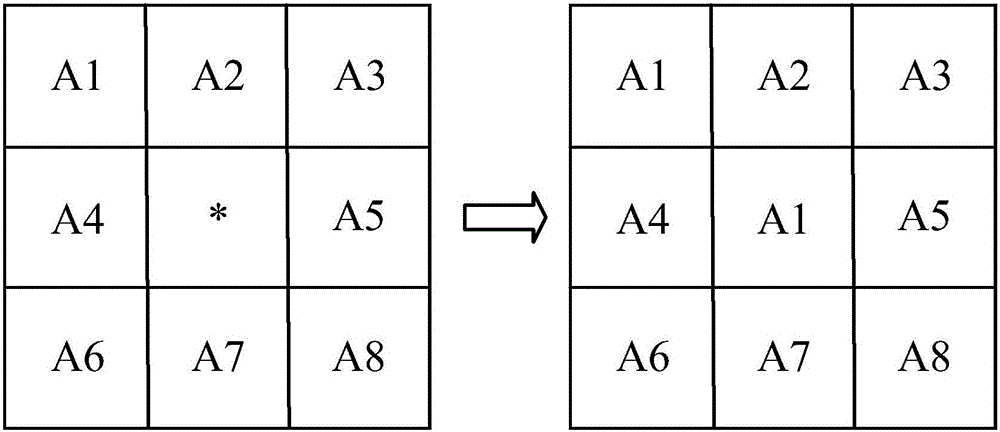
[0056] Step 520, performing morphological opening operation on the grid data to obtain an initial terrain surface.
[0057] Step 530, for each initial point, determine the target grid in the initial terrain surface where the current initial point falls, and calculate the difference between the elevation value of the current initial point and the value of the ta...
Embodiment 3
[0067] Image 6 It is a schematic flowchart of a point cloud data filtering method provided by Embodiment 3 of the present invention. This embodiment is optimized on the basis of the above-mentioned embodiments. In this embodiment, the step "constructing an initial triangulation network based on initial ground seed points model" has been optimized.
[0068] Correspondingly, the method of this embodiment includes the following steps:
[0069] Step 610, converting the point cloud data into raster data, and acquiring the lowest point in each grid in the raster data as an initial point.
[0070] Step 620, performing morphological opening operation on the grid data to obtain an initial terrain surface.
[0071] Step 630, for each initial point, determine the target grid in the initial terrain surface where the current initial point falls, and calculate the difference between the elevation value of the current initial point and the value of the target grid, when the difference is ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More