

Wall climbing robot for external wall corners
An exterior corner and robot technology, applied in the field of wall climbing robots, can solve the problems of low energy utilization rate, insufficient load capacity, high material and equipment requirements, and achieve good application prospects and market demand, low power, and small volume.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The present invention will be further described below with reference to the drawings and embodiments.
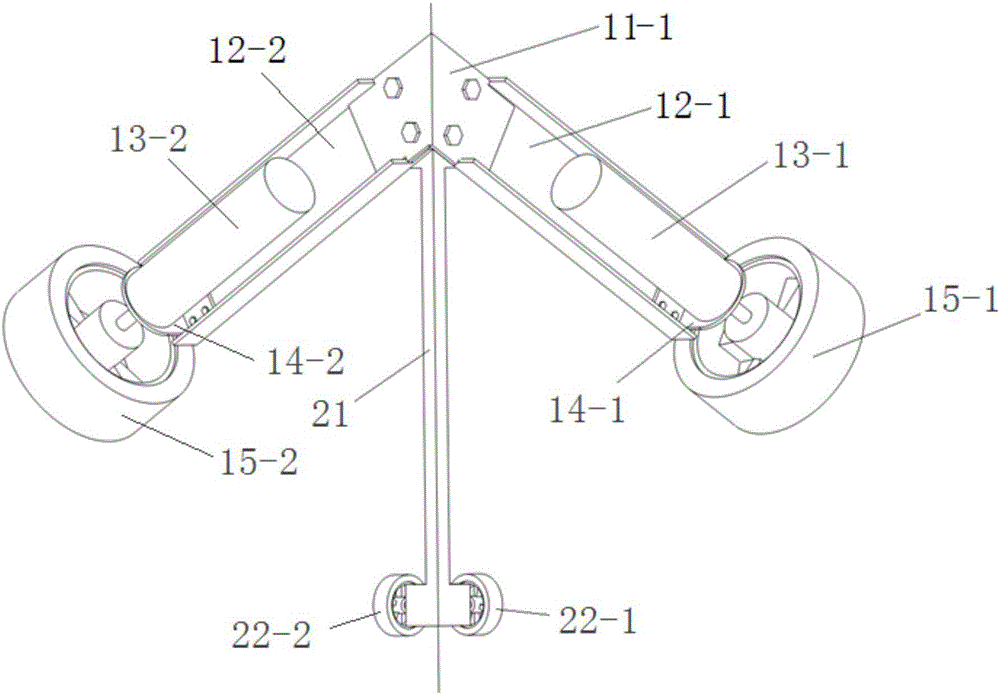
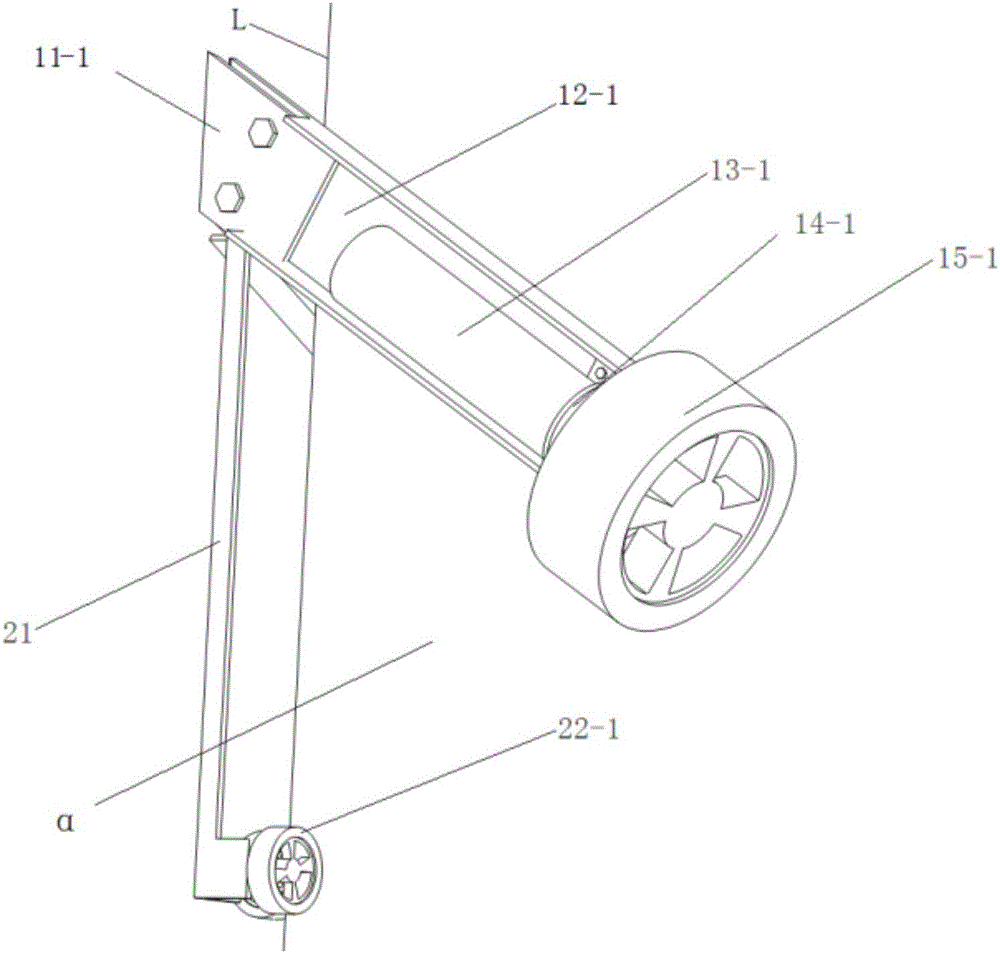
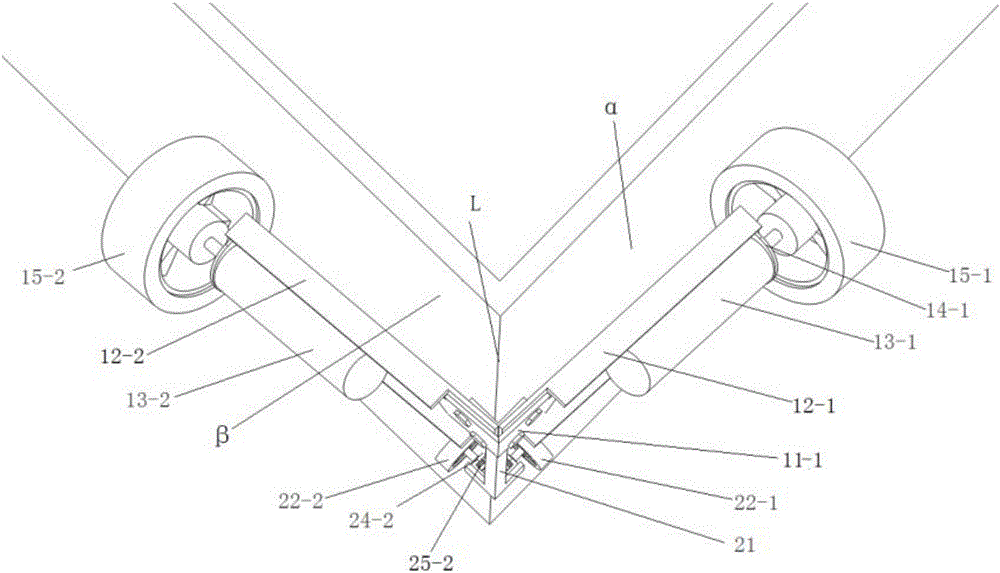
[0023] The invention discloses a wall-climbing robot for exterior wall corners, which is mainly divided into a fuselage part and a tail part. For the fuselage, it is mainly composed of drive wheels, motors, motor tripods, brackets and fixed plates. Such as Figure 1 to Figure 3 As shown, the fixing plate 11-1 is directly opposite to the external corner line L, the left side of the fixing plate 11-1 is connected to a bracket 12-2, and the right side of the fixing plate 11-1 is connected to a bracket 12-1. A motor tripod 14-1 is fixed on 12-1, a motor tripod 14-2 is fixed on 12-2, a motor 13-1 is installed on the motor tripod 14-1, and a motor tripod 14-2 is installed A motor 13-2, the output shaft of the motor 13-1 is connected to a driving wheel 15-1, the output shaft of the motor 13-2 is connected to a driving wheel 15-2, the driving wheel 15-1 is tangent to the wall ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More