

An Online Visual Inspection System for Robot Grinding
A visual inspection and robot technology, which is applied to the parts of grinding machine tools, grinding/polishing equipment, grinding automatic control devices, etc., can solve the problems of reducing processing accuracy, failure to automate, and reduce productivity, so as to improve processing quality and Efficiency, solving repositioning errors and time waste, and realizing the effect of automation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
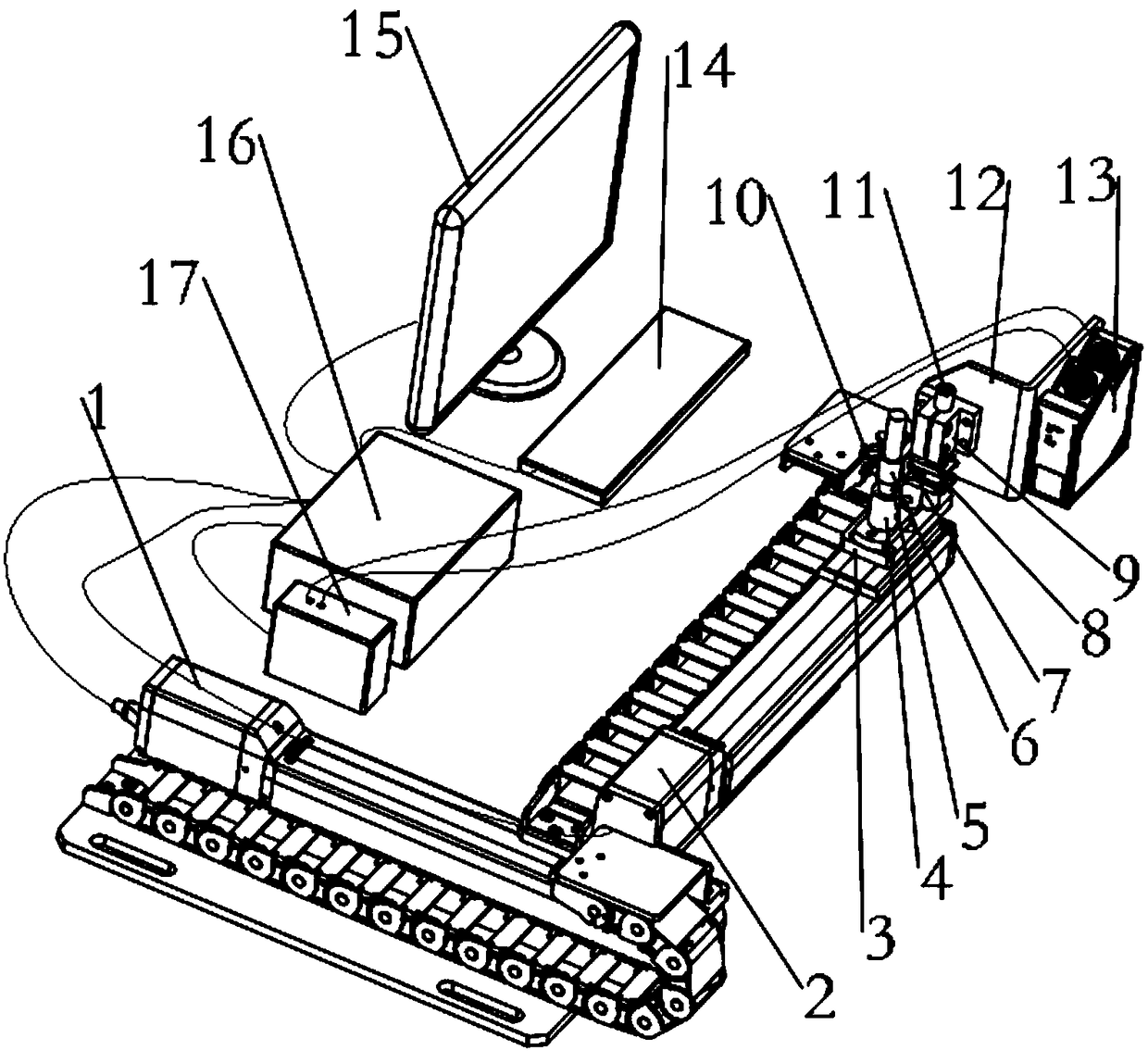
[0017] The principles and features of the present invention are described below in conjunction with the accompanying drawings, and the examples given are only used to explain the present invention, and are not intended to limit the scope of the present invention.
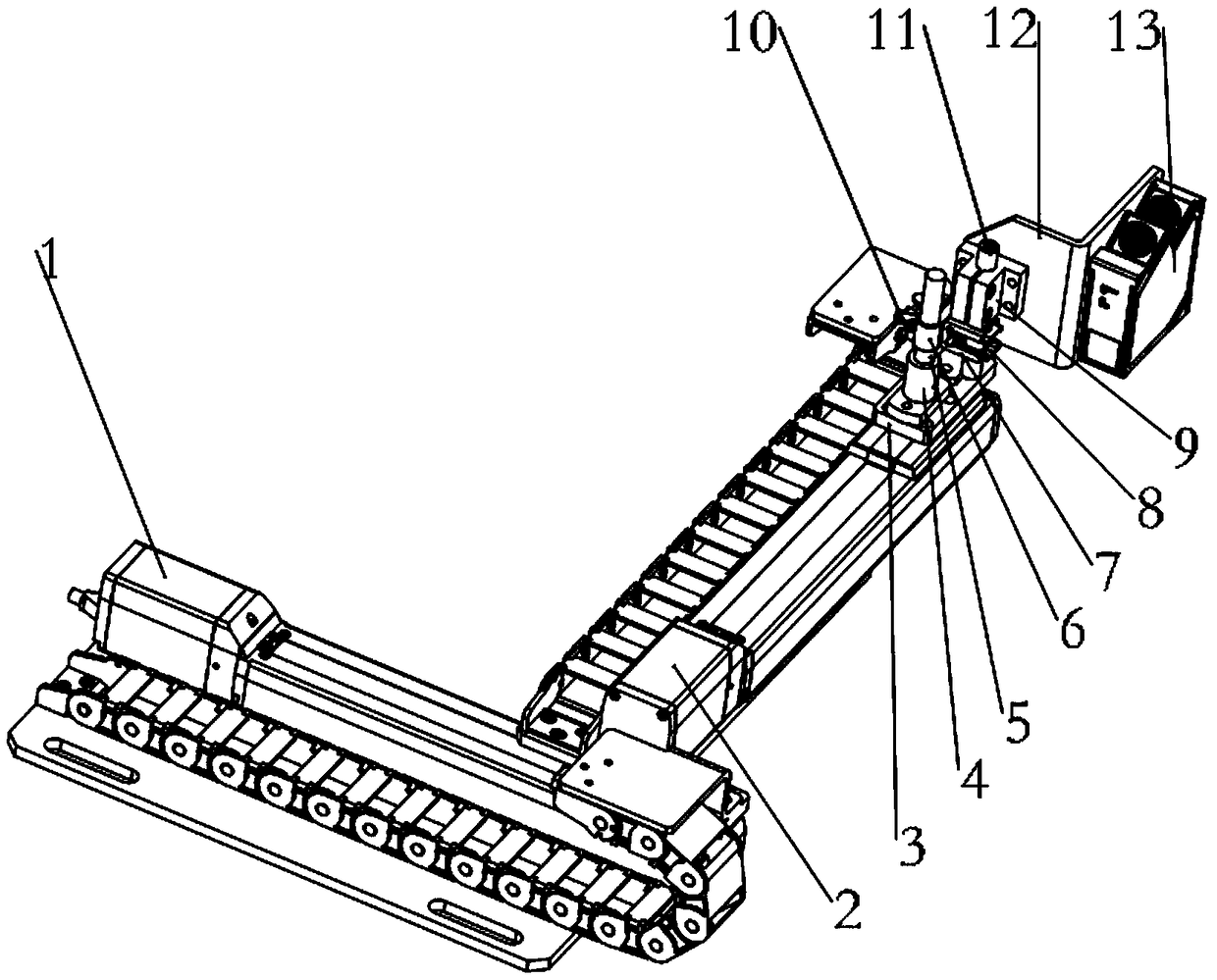
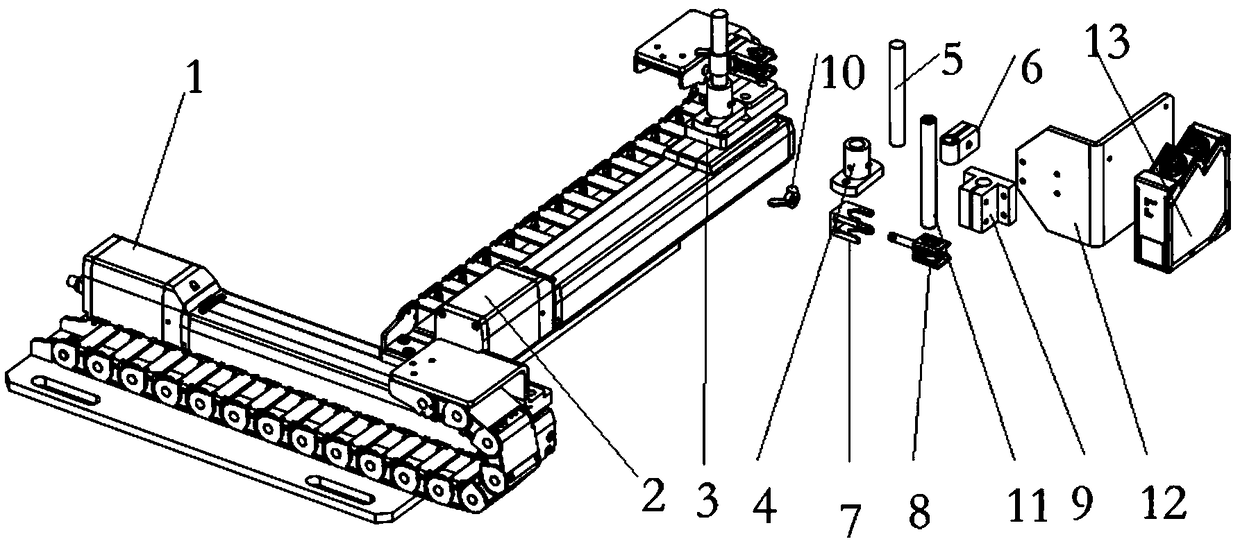
[0018] Such as Figures 1 to 5 As shown, the above-mentioned online visual inspection system for robot grinding is characterized in that it includes a three-dimensional laser measurement mechanism and a two-dimensional motion mechanism, and a pose adjustment mechanism is also arranged on the two-dimensional motion mechanism. The three-dimensional laser The measuring mechanism includes an industrial computer 16, and the industrial computer 16 is connected to the signal processor 17, and the signal processor 17 is connected to the three-dimensional laser camera 13 installed on the pose adjustment mechanism, and the industrial computer 16 is respectively connected to the X-direction guide rail 2 of the two-dimensional m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More