

Automatically revolving robot used for cleaning shrimp curved pipe
An automatic turning and shrimp bending technology, applied in the field of robotics, can solve the problems of high cost of chemical methods, causing accidents, time-consuming and labor-intensive artificial vibration methods, etc., to achieve the effect of guaranteed cleaning effect, convenient walking and compact structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
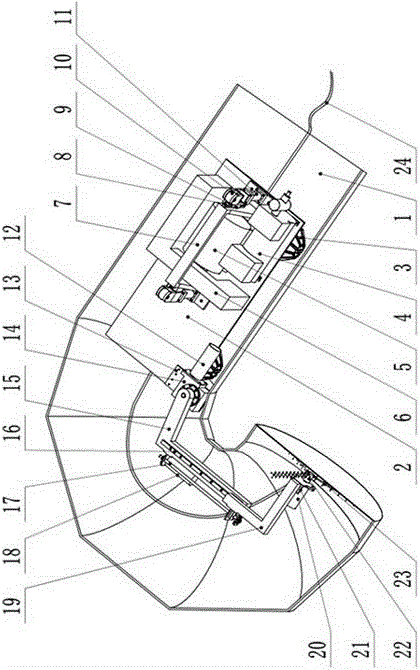
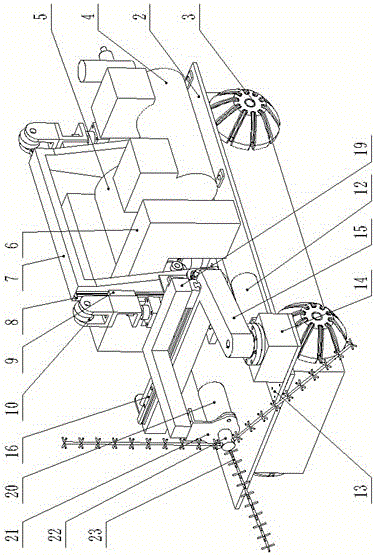
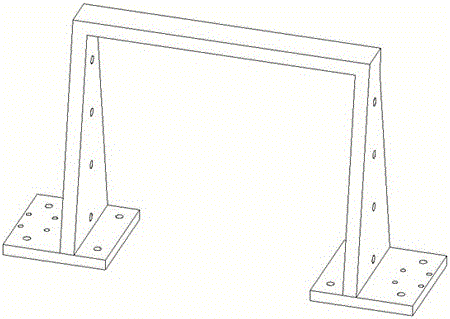
[0008] Such as figure 1 , figure 2 , image 3 As shown, the present invention is an automatic rotary robot for cleaning shrimp bends, consisting of four parts: a walking trolley, a constant force clamping mechanism, a rotary mechanism and a cleaning mechanism. The walking trolley consists of a frame 2, wheels 3, an air pump 4. The hydraulic pump 5 and the special-shaped hydraulic oil tank 6 are composed of four wheels 3, which are installed on the frame 2, the air pump 4 is installed at the left rear of the frame, the hydraulic pump 5 is installed directly behind the frame, and the special-shaped hydraulic oil tank 6 is installed on the vehicle frame, close to the hydraulic pump 5. The constant force jacking mechanism is composed of a beam 7, a vertical guide rail 8, a vertical slider 9, a tensioning wheel 10, and a cylinder 11. The beam 7 is installed On the vehicle frame 2, and in the middle of the width direction of the vehicle frame 2, the vertical guide rail 8 is insta...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More