

CoKriging-based absolute positioning error estimation method of mechanical arm
A technology of collaborative kriging and error estimation, applied in the field of robotics, can solve problems such as infeasibility and troublesome modification of non-open source control systems of robotic arms, and achieve the effect of improving accuracy and absolute positioning.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment approach
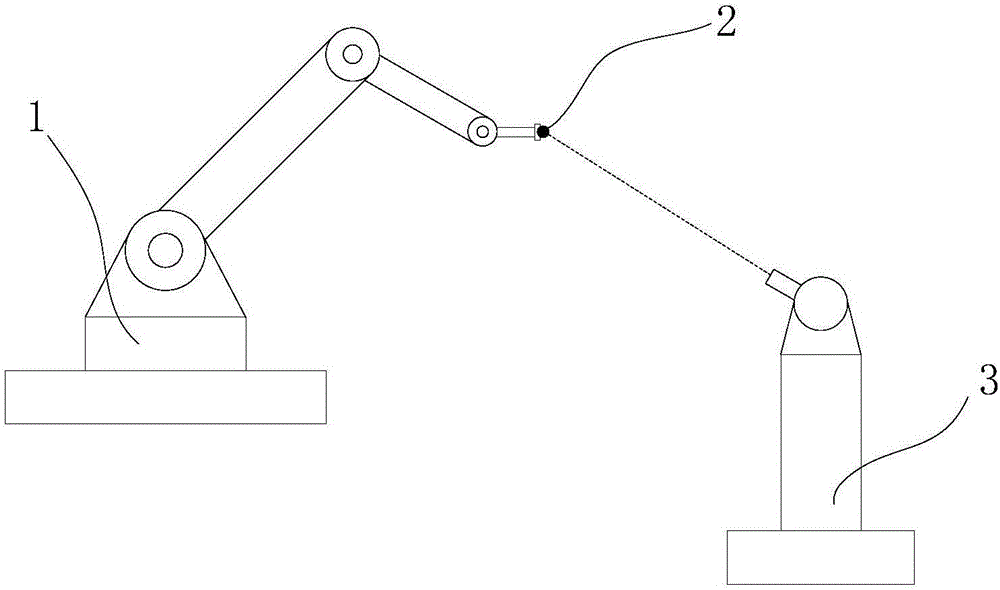
[0020] see figure 1 , the device used in the present invention is made up of mechanical arm, laser tracker and target ball. The target ball is pasted on the end flange of the mechanical arm.
[0021] The steps of the method of the present invention are described in detail below.
[0022] The specific implementation steps of the inventive method are as follows:
[0023] Step 1: Set up the laser tracker on the ground and keep the position fixed, and paste the target ball on the flange at the end of the mechanical arm, so that the measurement range of the laser tracker can cover the movement space of the mechanical arm;
[0024] Step 2: Use the target ball as the TCP, and the TCP is the center point of the tool. Calibrate the TCP to obtain the positional relationship of the target ball relative to the flange coordinate system at the end of the manipulator; and connect the coordinate system of the laser tracker to the Base mark system;
[0025] Step 3: Compile the NC program t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More