

Spaceflight servo motor variable working condition dynamic loading system and spaceflight servo motor variable working condition dynamic loading method
A dynamic loading, servo motor technology, applied in the direction of motor generator testing, etc., to eliminate the influence of excess force and accurately load
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention will be described in further detail below in conjunction with the accompanying drawings.
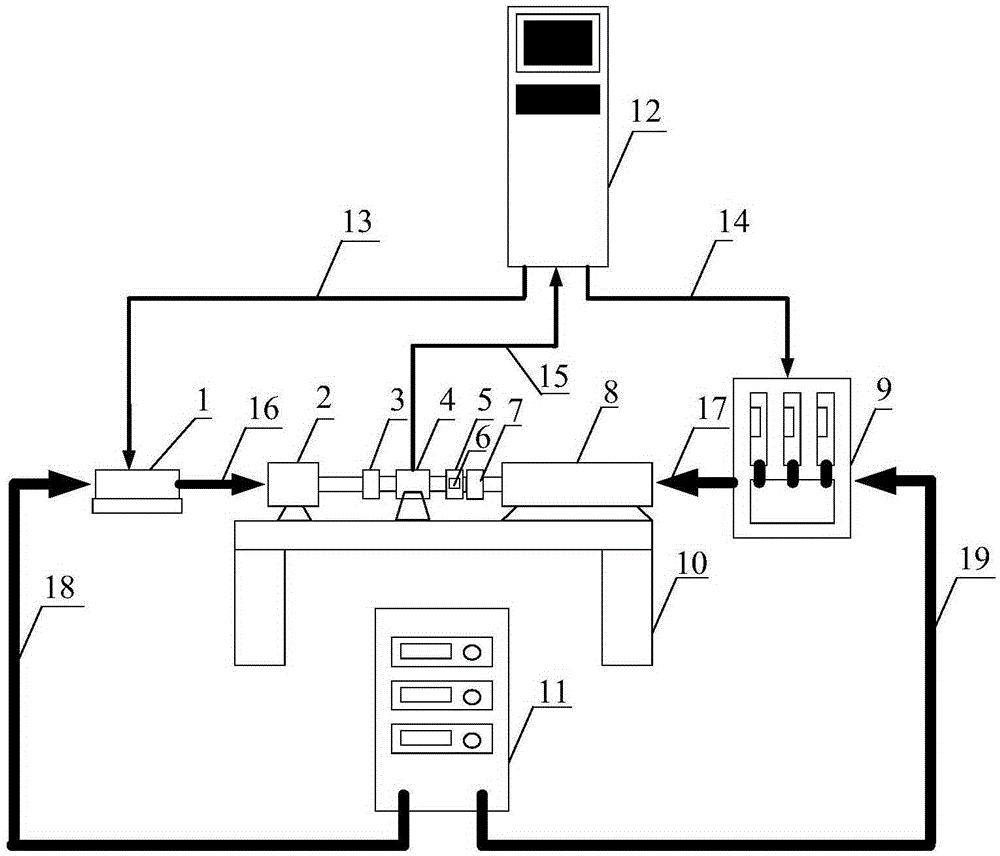
[0030] Such as figure 1 As shown, a dynamic loading system for aerospace servo motors under variable working conditions provided by the present invention, the system includes a tested motor driver 1, a tested motor 2, a first coupling 3, a torque sensor 4, a second coupling 5, acceleration sensor 6, electric slip ring 7, loading motor 8, loading driver 9, tooling stand 10, DC power supply 11, control cabinet 12, position instruction signal line 13, loading instruction signal line 14, torque speed acquisition signal line 15 , the signal line 16 of the motor driver under test and the motor under test, the signal line 17 of the loading driver and the loading motor, the first power source 18 and the second power source 19 . The DC power supply 11 supplies power for the dynamic loading system, and the motor under test 2 is coaxially connected with the loading mot...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More