

Unmanned aerial vehicle (UAV) obstacle avoidance method and system based on binocular vision and optical flow fusion
A binocular vision, unmanned aerial vehicle technology, applied in image data processing, instruments, 3D position/channel control and other directions, can solve the problems of difficult obstacle avoidance, expensive FPGA, difficult to apply, etc., to simplify the obstacle avoidance process, The effect of improving operation speed and improving real-time performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] Embodiments of the invention are described in detail below, examples of which are illustrated in the accompanying drawings. The embodiments described below by referring to the figures are exemplary only for explaining the present invention and should not be construed as limiting the present invention.
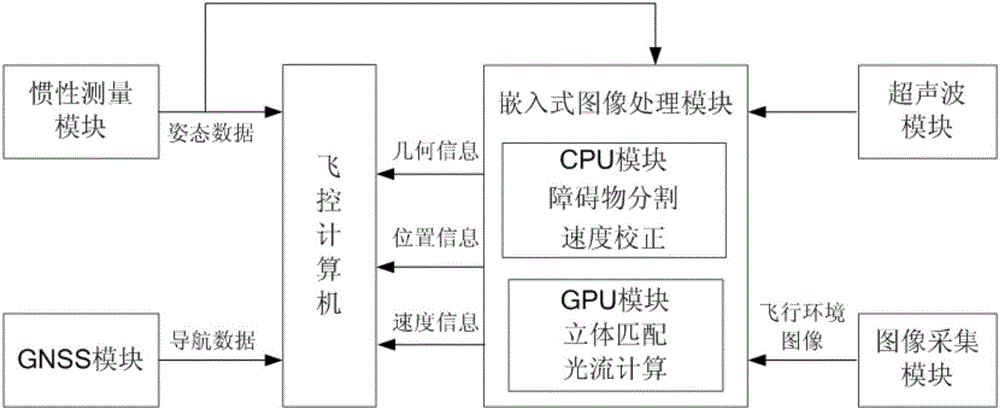
[0044] Such as figure 2 As shown, it is a hardware structural diagram of the UAV obstacle avoidance system based on binocular vision and optical flow fusion of the present invention. The system includes an image acquisition module, an embedded image processing module, a flight control computer, an ultrasonic module, and a GNSS (Global Navigation Satellite System global satellite navigation system) module and inertial measurement module, wherein the embedded image processing module includes a CPU module and a GPU module, and the ultrasonic module includes four ultrasonic sensors, which are installed in the front, rear, left and right directions of the drone The ultrason...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More