

Rapid attitude stabilization method suitable for space robot actuator failure
A space robot and stabilization method technology, applied in aircraft, attitude control, space navigation equipment, etc., can solve problems such as long adjustment time, large jet engine consumption, shortening system operation period, etc., to reduce fuel consumption and speed up convergence. effect of speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] The present invention is described in further detail below:
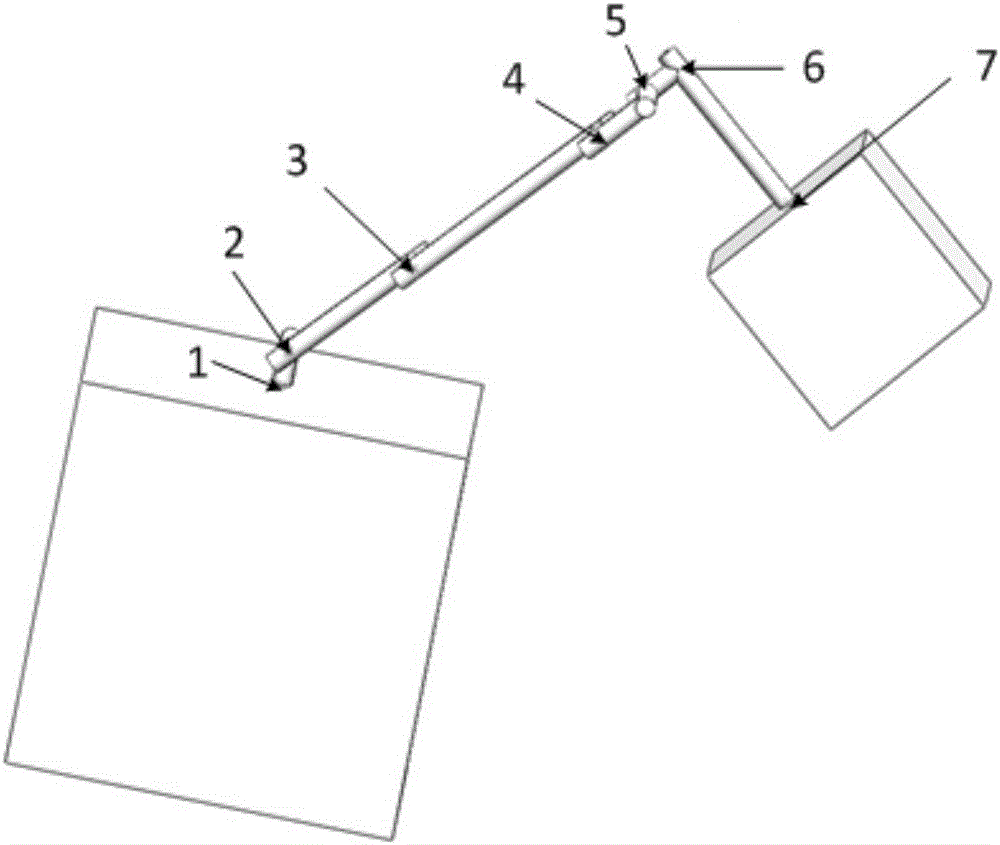
[0046] The technical problem to be solved by the present invention is to quickly stabilize the attitude of the base after the space robot captures the rotating target under the consideration of actuator failure. The main principle is: firstly, the dynamic model of the space robot system after capturing the target is established by using the recursive method, and then the inverse dynamic model of the system is obtained, and the coordination control model between the manipulator motion and the control torque is obtained by processing the model, and The designed base attitude motion angular acceleration and the planned control torque information are input into the control model. Considering the working characteristics of the control torque generated by the jet engine relative to the fixed direction of the base system, the corresponding control torque can eliminate the balance attitude of the system angular moment...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More