

A three-dimensional moving target detection method and system
A three-dimensional motion and target detection technology, applied in the field of computer vision, can solve the problems of inaccurate detection effect, large amount of data analysis, and high detection false alarm rate, so as to reduce the false alarm rate, reduce the detection area, and improve the detection efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
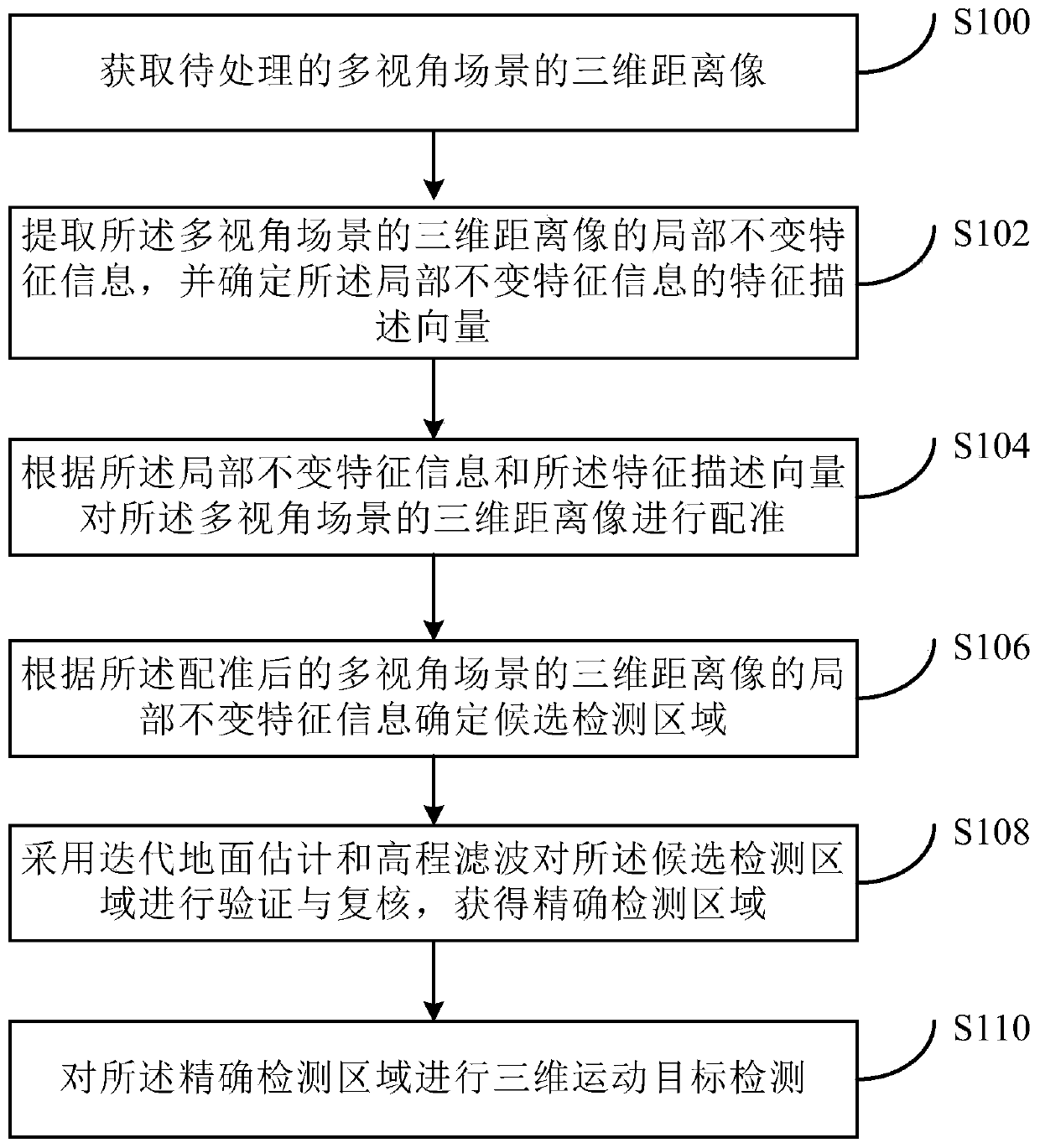
[0033] figure 1 A flow chart of steps of a method for detecting a three-dimensional moving object according to Embodiment 1 of the present invention is shown.
[0034] refer to figure 1 , the three-dimensional moving object detection method of the present embodiment comprises the following steps:
[0035] Step S100, acquiring a 3D range image of a multi-view scene to be processed.
[0036] In this step, the three-dimensional range image includes three-dimensional moving targets and background interference, and the three-dimensional range image can be real data obtained by a distance sensor (such as a laser radar, etc.), or simulated data obtained by a simulation software.
[0037] In order to ensure the speed of transmission and processing, drawing on the parallel processing method of multiple receptive fields of the human retina, the master control computer platform synchronously transmits the 3D distance images of the multi-view scenes to be processed to multiple network c...
Embodiment 2
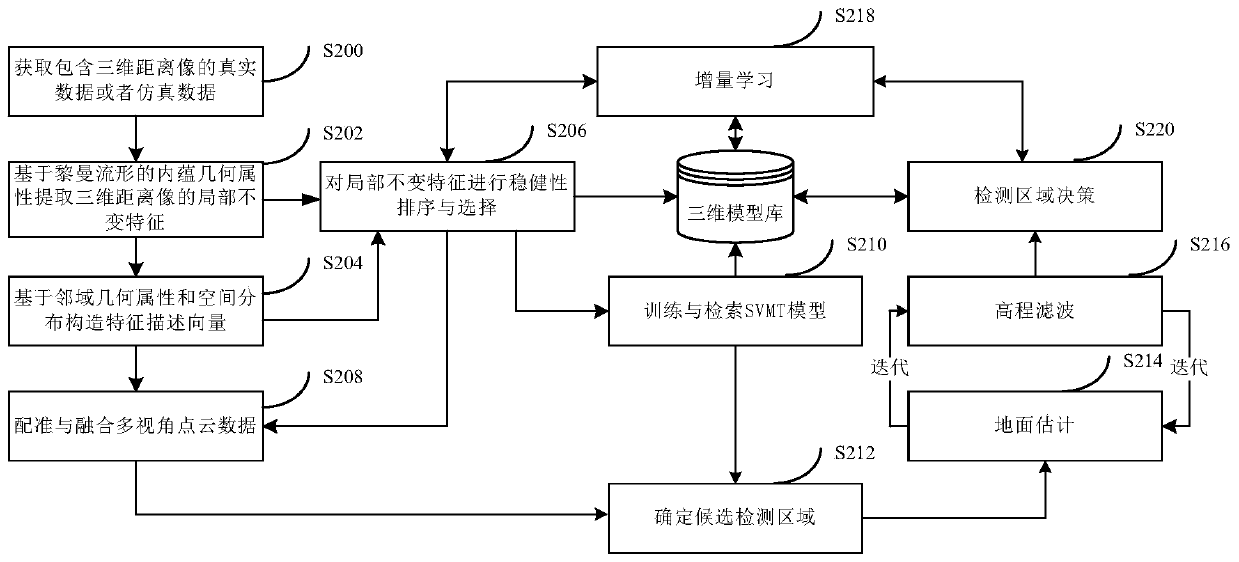
[0055] figure 2 A flow chart of steps of a method for detecting a three-dimensional moving object according to Embodiment 2 of the present invention is shown.
[0056] refer to figure 2 , the three-dimensional moving object detection method of the present embodiment comprises the following steps:
[0057] Step S200, acquiring real data or simulated data including a three-dimensional range image.
[0058] In order to ensure the speed of transmission and processing, drawing on the parallel processing method of multiple receptive fields of the human retina, the master control computer platform transmits the three-dimensional range images to be processed synchronously to multiple network computers to realize parallel multi-channel processing. The 3D range image usually contains multiple 3D moving targets and background interference. The 3D range image can be the real data obtained by the distance sensor (such as lidar, etc.), or the simulated data obtained by the simulation so...
Embodiment 3
[0087] Figure 4 A structural block diagram of a three-dimensional moving object detection system according to Embodiment 3 of the present invention is shown.
[0088] The 3D moving object detection system in this embodiment includes: an acquisition module 400, configured to acquire a 3D range image of a multi-view scene to be processed, the 3D range image including a 3D moving object; an extraction module 402, configured to extract the multiple The local invariant feature information of the three-dimensional range image of the viewing angle scene, and determine the feature description vector of the local invariant feature information; the registration module 404 is used to align the local invariant feature information and the feature description vector according to the local invariant feature information and the feature description vector The three-dimensional range image of the multi-view scene is registered; the determination module 406 is used to determine the candidate de...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More