

Grid-connected control method and system based on virtual synchronous generator
A virtual synchronization and control method technology, applied in electrical components, circuit devices, AC network circuits, etc., can solve the problems of frequency fluctuations, not taking into account the influence, the inverter is difficult to meet the flexible and stable operation of the microgrid, and achieves suppression Current deviation, the effect of improving stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
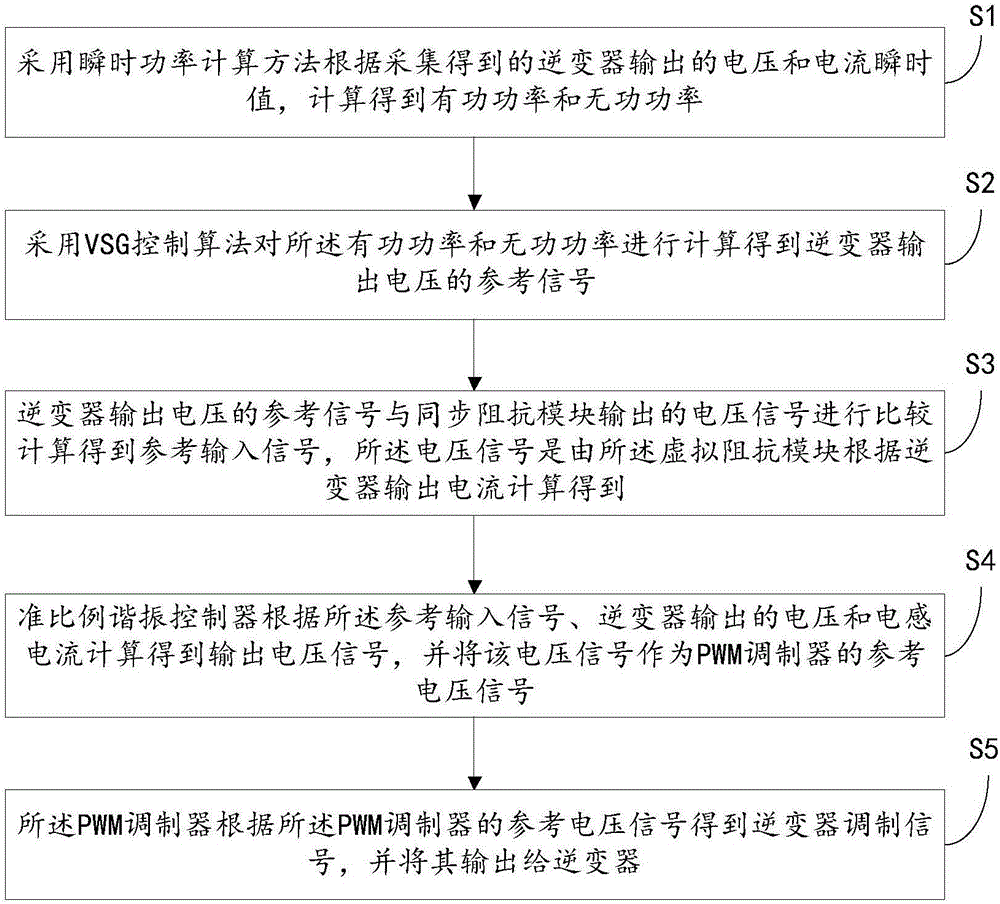
[0046] Embodiment 1. A grid-connected control method based on a virtual synchronous generator. Combine below Figure 1 to Figure 6 The method provided in this embodiment will be described in detail.
[0047] see Figure 1 to Figure 6 , S1, using the instantaneous power calculation method to calculate the active power and reactive power according to the collected instantaneous values of the voltage and current output by the inverter.
[0048] S2. Using the VSG control algorithm to calculate the active power and reactive power to obtain a reference signal of the inverter output voltage.
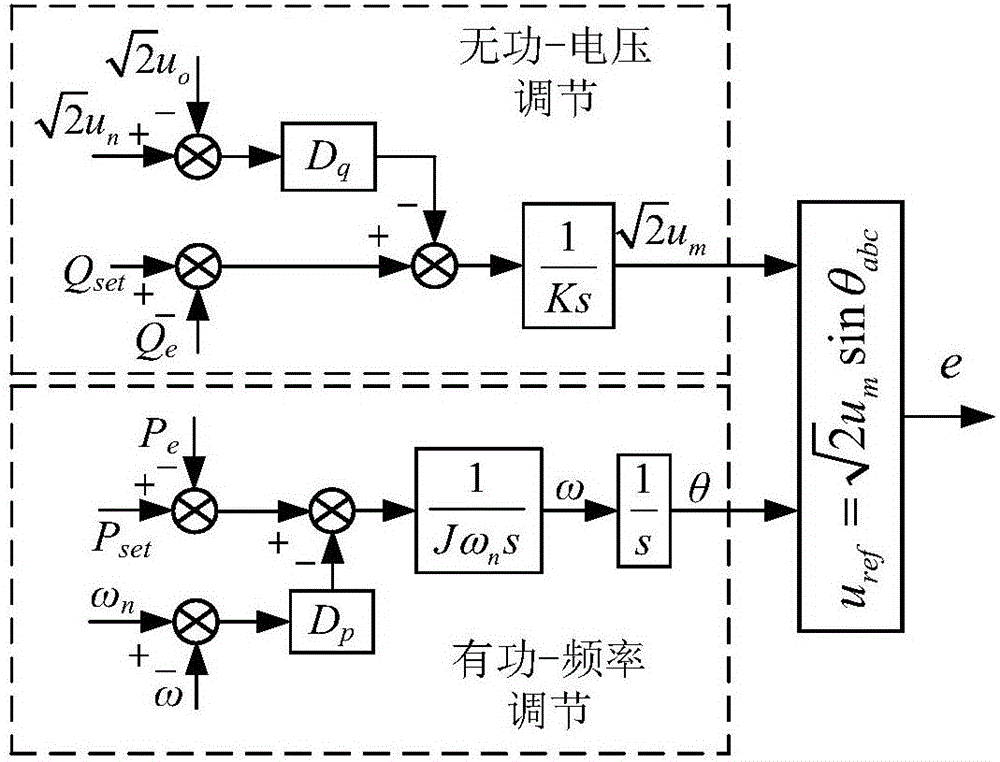
[0049] Specifically, such as image 3 As shown, the virtual synchronous machine control algorithm draws on the second-order classical equation of the synchronous generator and the governor and excitation controller, so the VSG control algorithm is designed, and its mathematical equations are shown in formula (1) to formula (3):
[0050]
[0051]
[0052]
[0053] Among them, T s...
Embodiment 2
[0103] Embodiment 2. A grid-connected control system based on a virtual synchronous generator. Combine below Figure 2 to Figure 6 The system provided in this embodiment will be described in detail.
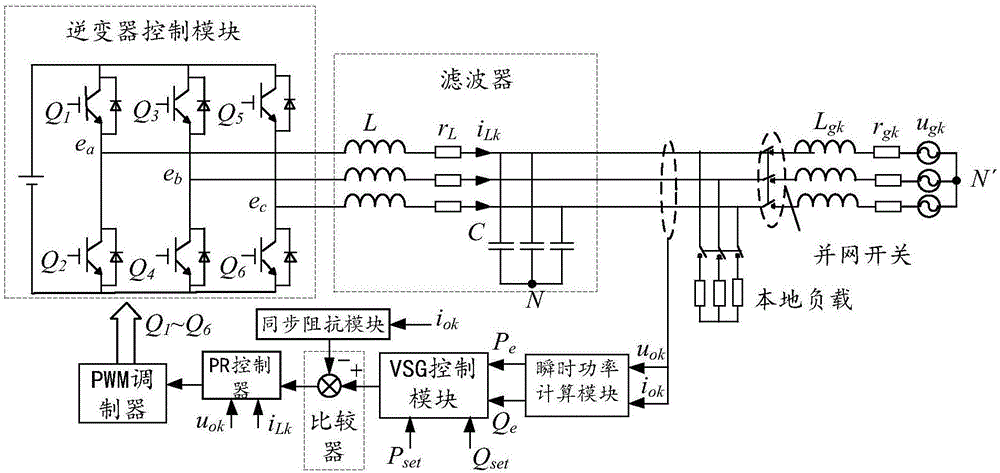
[0104] see Figure 2 to Figure 6 , a grid-connected control system based on a virtual synchronous generator, the system includes: a three-phase full-bridge inverter, a filter, an instantaneous power calculation module, a VSG control module, a synchronous impedance module, a comparator, and a quasi-proportional resonance control devices as well as PWM modulators.
[0105] The output end of the instantaneous power calculation module is electrically connected to the input end of the VSG control module, the output end of the VSG control module and the output end of the virtual impedance module are both electrically connected to the input end of the comparator, The output end of the comparator is electrically connected to the input end of the quasi-proportional resonant controller,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More