

Improved active-disturbance-rejection position controller for direct current (DC) motor, and design method of improved active-disturbance-rejection position controller
A DC motor, an improved technology, applied in the direction of motor generator control, electronic commutation motor control, control of electromechanical brakes, etc., can solve the problems of untimely control and low system error gain, etc., and achieve strong resistance to external interference, The effect of faster response and quick response
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
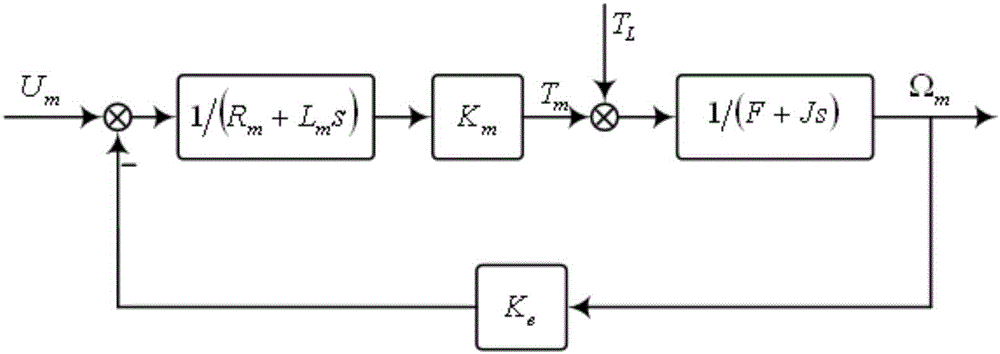
[0084] The present invention selects DC torque as the motor body, uses the mechanism method to carry out mathematical modeling on the motor, figure 2 The DC motor model diagram that the present invention uses shown, the state model of its motor position control is:
[0085]
[0086] Among them, k e is the back EMF coefficient is 6, k m is the motor torque constant of 2, T L is the load torque, R m is the armature resistance is 2, J is the moment of inertia of the load and the rotor is 1, both belong to the constant set. where x 1 = θ, x 2 = ω, θ is the motor rotation angle, ω is the angular velocity of the motor.
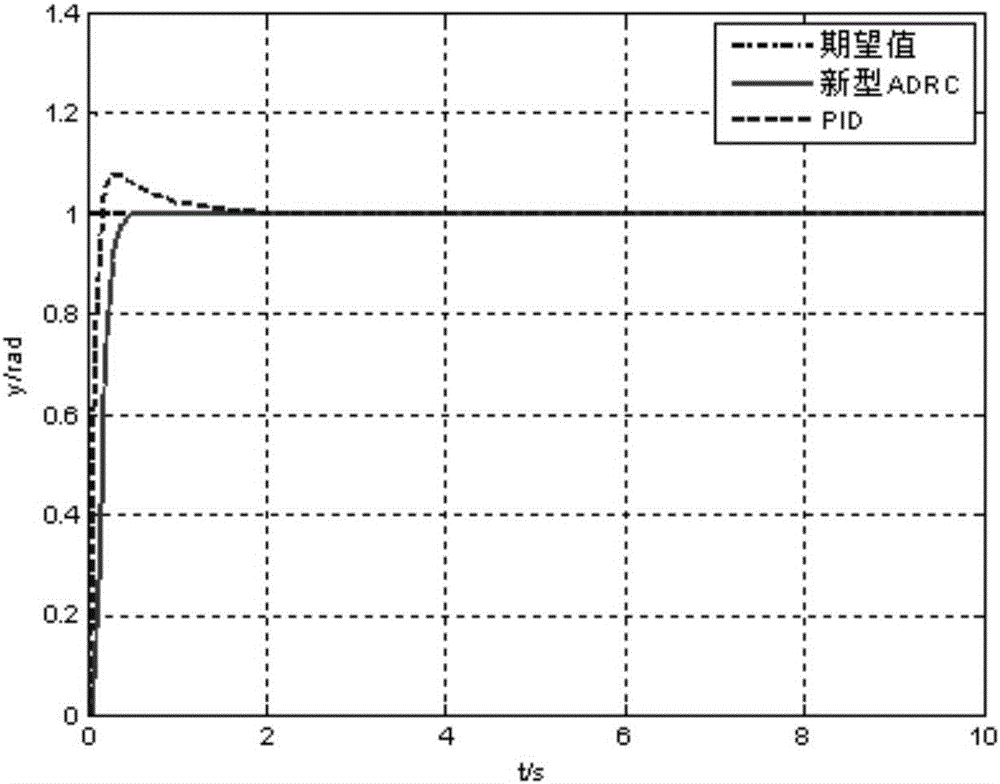
[0087] In this example, the purpose of the system control is to speed up the tracking of the input signal r, so that the time required for the motor to reach a stable position is less, the speed is faster, and it is more robust and more resistant to external interference.
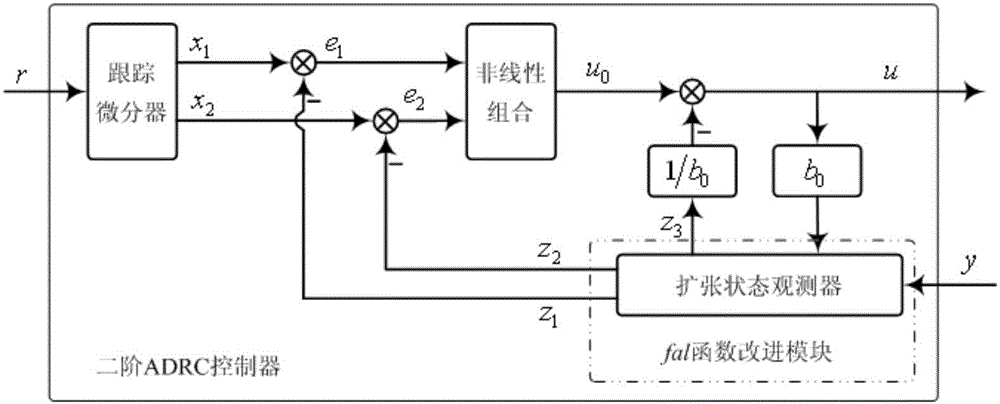
[0088] For this system, according to figure 1 The controller can be designed as f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More