

Industrial robot quickly teaching device and realizing method thereof
An industrial robot and teaching device technology, which is applied to manipulators, manufacturing tools, program-controlled manipulators, etc., can solve the problems of not realizing the teaching restoration function and lack of versatility, and achieve the effect of improving the teaching speed and processing efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
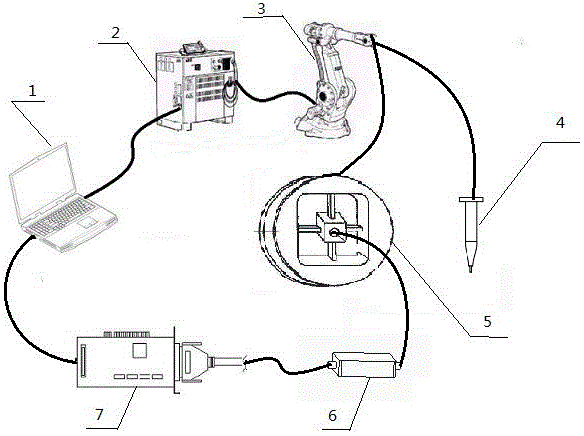
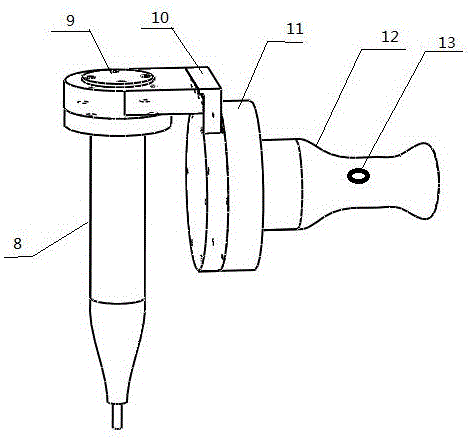
[0044] The constitutional principle of the device of this embodiment is as follows: figure 1 As shown, the present invention provides a fast teaching device for an industrial robot. The fast teaching device consists of an industrial robot 3, a robot controller 2, an end effector 4, a teaching module 5, and a signal amplifier 6. A data collector 7 and a computer 1; the end effector is fixed to the end of the industrial robot, the teaching module is fixed to the end effector, and one end of the signal amplifier is connected to the end effector. The teaching module, the other end is connected to the data collector, the data collector is connected to the computer, the computer is connected to the robot controller, and the robot controller is connected to the industrial robot; The teaching module includes a six-dimensional force / torque sensor, a teaching ha...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More