

Attitude adjustment mechanism for underwater robot
A technology for underwater robots and regulating mechanisms, which is applied to underwater ships, underwater operating equipment, motor vehicles, etc., can solve the problems of large volume, high energy consumption, and low reliability, and achieve small volume, high transmission efficiency, The effect of not consuming energy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] Below in conjunction with accompanying drawing and specific embodiment the present invention is described in further detail:
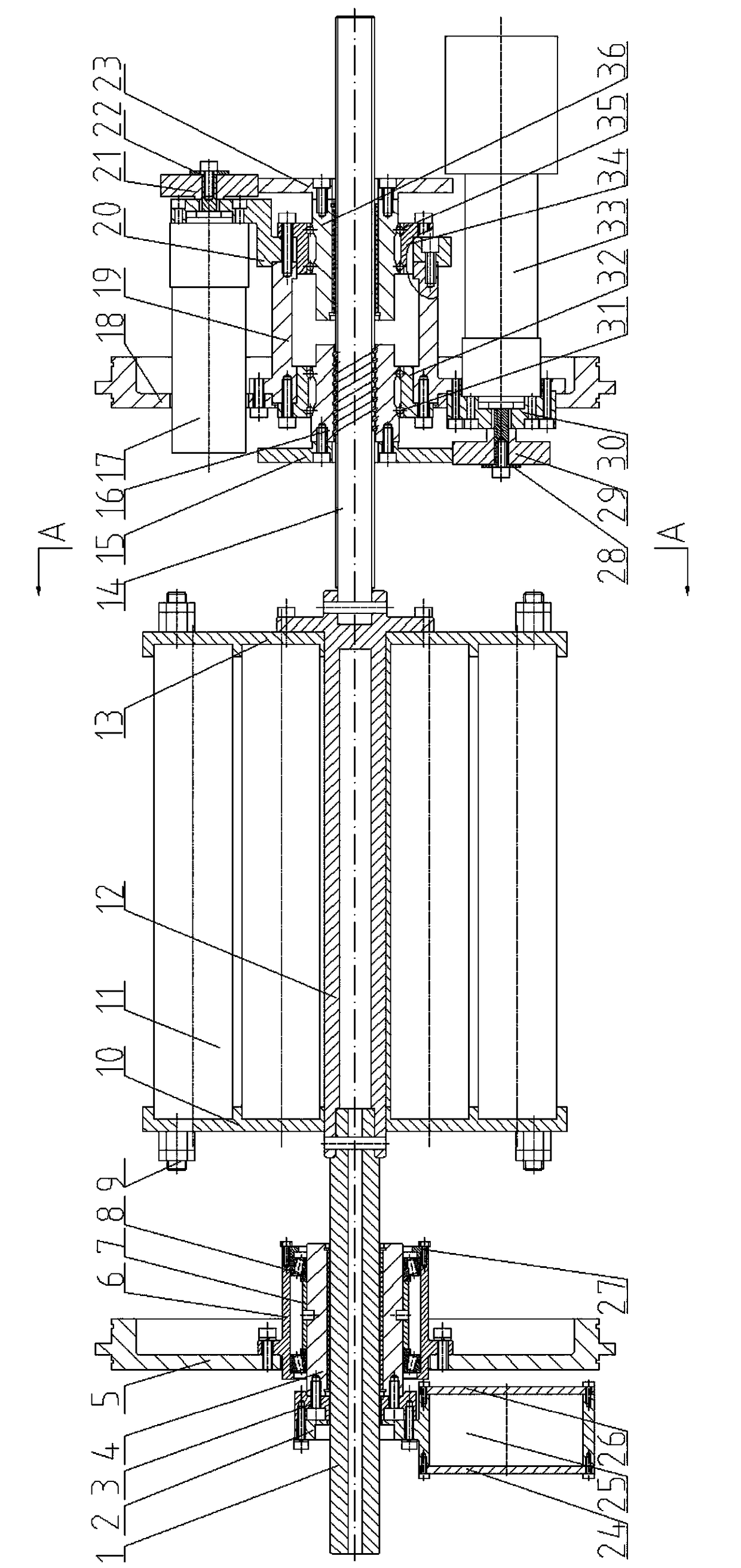
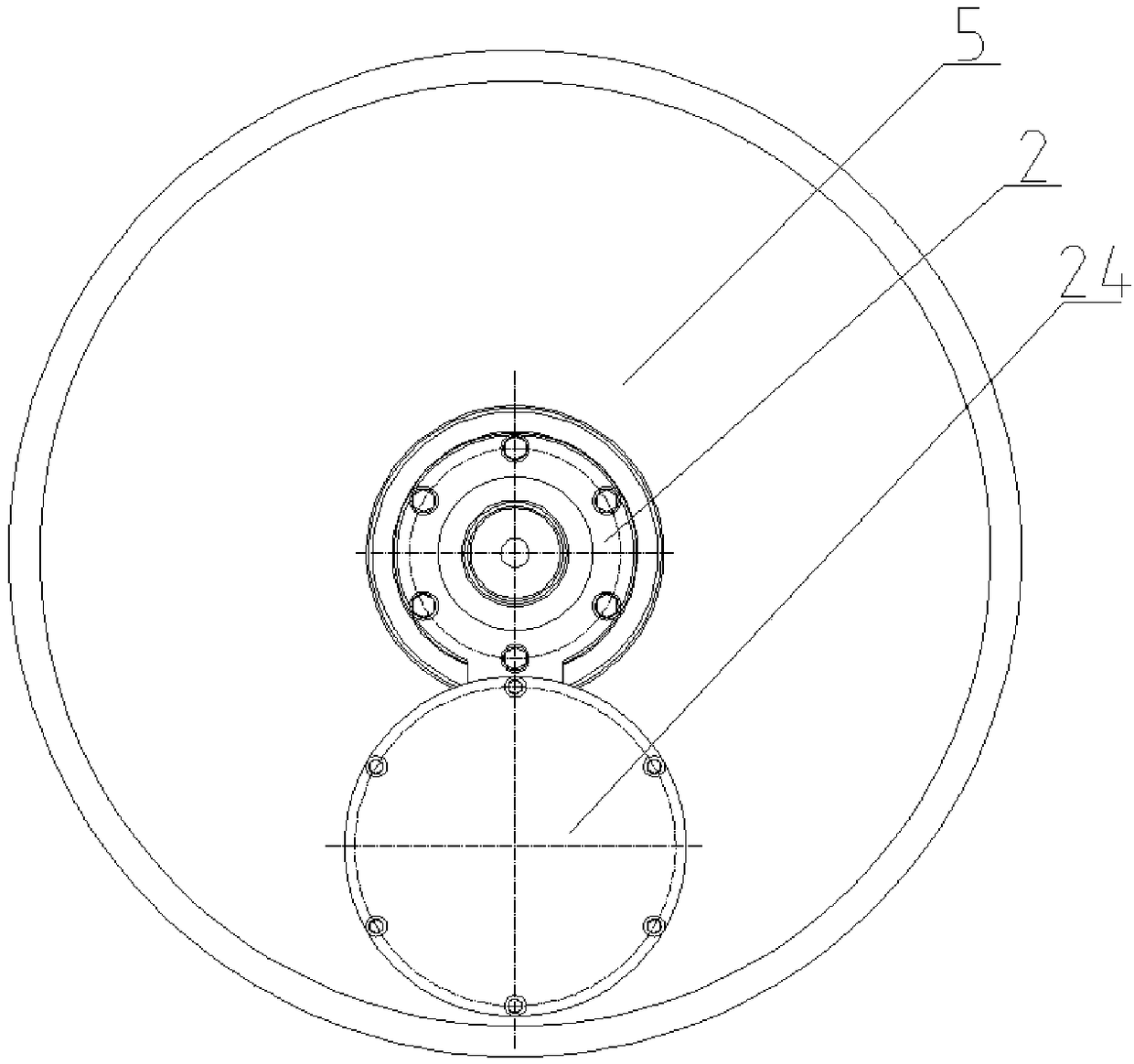
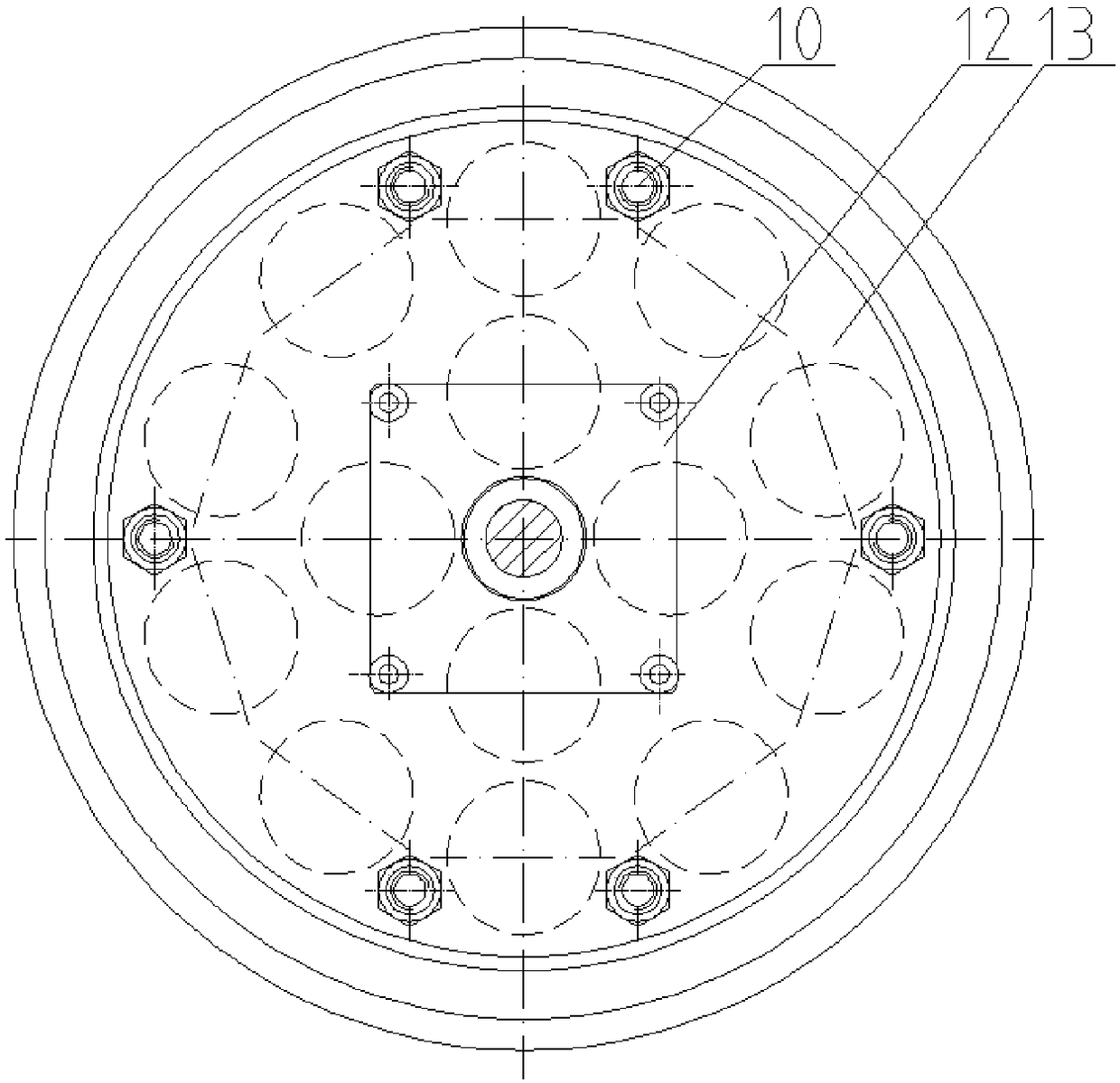
[0035] Such as figure 1 Shown is a schematic structural diagram of the motion attitude adjustment mechanism for underwater robots. It can be seen from the figure that an attitude adjustment mechanism for underwater robots includes: ball spline shaft 1, suspension 2, suspension adapter 3, and spline nut I4, front connecting plate 5, bearing seat 6, bearing inner retaining ring 7, tapered roller bearing 8, tension rod 9, left connecting plate 10, battery pack 11, hollow connecting shaft 12, right connecting plate 13, lead screw flower Key spindle 14, axial large gear 15, nut 16, deflection drive system 17, rear connection plate 18, main connection shell 19, deflection drive system mounting plate 20, offset pinion gear 21, compression piece I22, offset bull gear 23. Left baffle 24, battery counterweight 25, right baffle 26, bearing top cover 27, c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More