

Drive-by-wire differential steering system and method for distributed driving electric vehicle
An electric vehicle and steering system technology, applied in the field of vehicle control, can solve problems such as increased inertia of the steering system, noise of the steering motor, complex system structure, etc., and achieve the effects of eliminating increased inertia, increasing space, and simplifying the steering structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0058] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments. This embodiment is carried out on the premise of the technical solution of the present invention, and detailed implementation and specific operation process are given, but the protection scope of the present invention is not limited to the following embodiments.
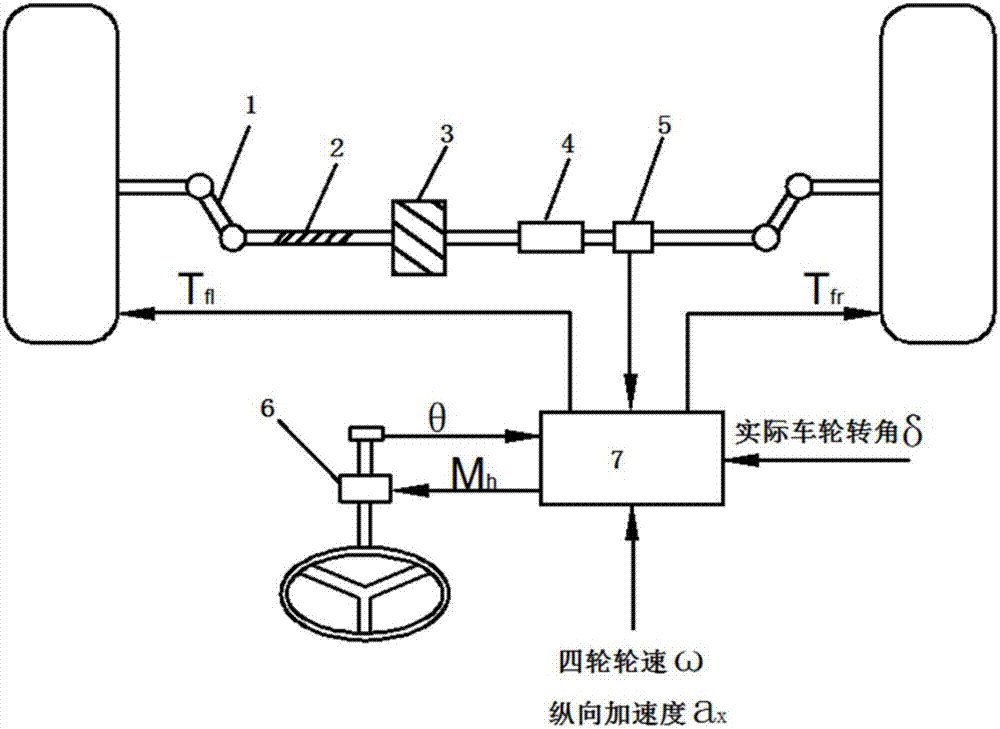
[0059] Such as figure 1 As shown, this embodiment provides a differential-by-wire steering system for distributed drive electric vehicles, including: a detection module for detecting driving parameters of the electric vehicle; a differential-by-wire steering control module 7 for Calculate the front axle differential torque when the electric vehicle turns according to the driving parameters fed back by the detection module, and calculate according to the front axle differential torque to obtain the target output torques of the left and right drive motors of the front axle respectively ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More